汽车侧向倾斜角度传感器的应用

角度传感器在控制系统中通常作为采样元件,其性能的优劣对整个系统起着重要作用。电位器式角度传感器已在各种控制系统中广泛应用, 但它的缺点是存在触点的滑动磨损和电噪声; 磁敏电阻式角度传感器是利用半导体技术制造的新型纯电阻性元件, 特点是无触点, 当摆动部分偏转时, 通过磁敏电阻的磁通量发生变化, 使磁敏电阻的阻值发生数倍以上的变化, 从根本上消除了电噪声, 并使精度得以提高。
各种角度传感器都具有阻尼功能, 使得对所测得角度的响应有一个短暂的延时———对控制系统来讲是有益处的。
3 角度传感器电路
图2 是侧向倾斜角度传感器的一种实用电路,主要由单电源运算放大器(如LM324) 组成, 其作用是将角度传感器中的电位器W1 输出的线性变化的模拟电量进行处理、放大, 能够按规定输出数字量和模拟量。令水平时电位器W1 滑动点Ui 的电位为(1P2) Ec ( Ec 为稳压电源电压, 通常为9 V 或15 V ,下同) , R1 、R2 、R3 、R4 为附加电阻, 并使R1 = R2 ,R3 = R4 , W2 为调中电位器, 阻值很小。调整W2 ,当W1 处于水平状态时, 使运放A1 、A2 输出端电位为(1P2) Ec 。运放A1 组成反相比例运算放大器, 作为电路的前置级放大, 输入电压为Ui , 输出电压U1 =- ( R7PR5 ) Ui , 且应使R6 = R5 ∥R7 ; 运放A2 组成反相器, 电阻R10 = R8 , 且应使R9 = R8 ∥R10 ; 输出电压U2 = - U1 = ( R7PR5 ) Ui 。A1 和A2 的输出端分别由发光二极管LED1 、LED2 组成或门电路输出,使得汽车不论是左倾还是右倾, 输出端Uo1均能输出与输入量Ui (随倾斜角度变化) 成正比例线性关系的模拟信号, 即Uo1 = ( R7PR5 ) | Ui | , 去控制后面的电路或机构。发光二极管还能指示倾斜方向, 当水平状态时, 模拟量输出端Uo1 = (1P2) Ec 。
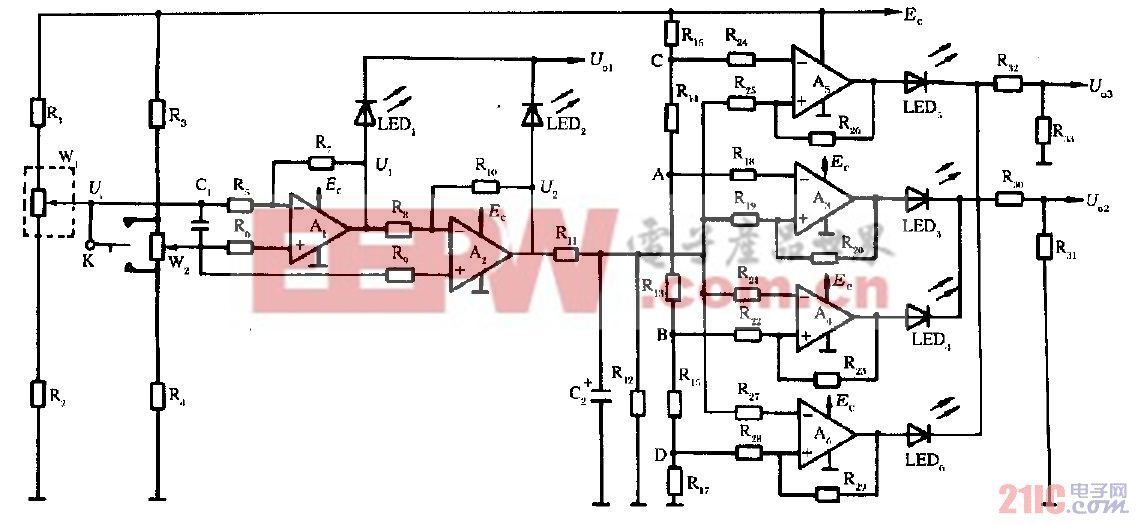
运放A3 、A4 和A5 、A6 分别组成窗口比较器,电阻R20 、R23 、R26 、R29是阻值较大的正反馈电阻,以改善运放的开关状态工作性能, 电阻R13 ~R17 为分压电阻, 且应R14 = R15 , R16 = R17 , 电阻R13 中点处的电位为(1P2) Ec , 分压电阻的阻值应根据U2的变化所反应的倾翻力决定, 使得运放A3 和A5 的反相输入端、运放A4 和A6 的同相输入端获得不同的开关转换基准电位, 而且所反应的左右倾斜程度是一致的。水平时, U2 = (1P2) Ec , 运放A3 ~A6均输出低电平; 倾斜时, U2 的电位发生变化, 运放A3~A6 按规定要求输出高电平。例如, 电位器W1 左摆时, 使U2 电位升高, 当高于A 点电位时,运放A3 输出高电平, 二极管L ED3 显示倾斜方向,若汽车继续向左倾斜, 使U2 电位继续升高, 当高于C 点电位时, 运放A5 输出高电平, 二极管L ED5显示倾斜方向且程度加重; 同理, 若电位器W1 右摆, 运放A4 和A6 的工作亦如此。2 个输出端Uo2和Uo3输出的数字信号所反映倾斜程度与倾斜方向无关, 很明显, Uo3有高电平信号输出时, Uo2 已经输出高电平, Uo3所反映的倾斜程度大于Uo2 。
K为自动复中位型扭子开关, 作为电路的检验开关, 当上下搬动时, 应分别使二极管L ED2 、L ED3 、L ED5 和L ED1 、L ED4 、L ED6 发亮。电容器C1 为高频旁路电容器, C2 为低频滤波电容器, 并与电阻R12 组成放电回路, 形成延时环节, 在系统中相当于传感器中的阻尼作用增加。
4 应用
根据前文对图2 电路的叙述可知, 汽车侧向倾斜角度传感器的应用有2 种形式。一是由电路发出的数字信号Uo2 , 驱动声光信号装置, 提醒驾驶员减速; 二是由电路发出的数字信号Uo3 或模拟信号Uo1控制执行机构, 使汽车自动减速, 采用数字信号组成定量减速系统, 减速时略有些速度忽变, 采用模拟信号组成比例减速系统, 减速的效果比较平滑, 实现减速的方法有2 种, 一是减小发动机油门开度, 二是增加制动。下文分述。
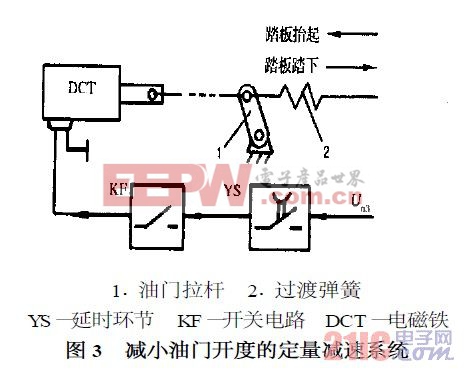
4.1.1 减小油门开度的定量减速系统由传感器电路发出的数字信号, 控制执行元件(如电磁铁) 组成减小发动机油门开度的定量减速系统, 如图3 所示。汽车正常行驶时, 油门拉杆由油门踏板控制, 电磁铁中的动铁心随油门拉杆同步移动; 当汽车侧向倾斜(指速度、转弯半径及路面坡度的综合值, 下同) 超过设定值时, 传感器电路输出端Uo3发出信号, 经延时环节YS (如时间继电器, Uo3消失后, YS 延时断开, 若阻尼和电路的延时足够, 可以不设) , 开关量放大环节KF (如继电器) , 使电磁铁DCT 得电工作, 动铁心迅速移动至终止位置, 带动油门拉杆, 使油门开度突然减小。
在这一系统中, 动铁心移动的起始位置不是固定的, 终止位置是可以预先设定的, 所获得的减速程度有所不同。因此, 应根据不同的车型, 合理地设定发动机减速所要达到的转速, 使减速不至于过于突然。
4.1.2 减小油门开度的比例减速系统为了避免上述系统中减速的突变性,应采用比例减速系统, 如图4 所示。在比例减速系统中, 由传感器电路Uo1 端输出模拟电压信号, 控制电流放大板DF , 按照输入信号Uo1的大小, 输出不同的电流值, 使比例电磁铁产生不同的位移, 油门开度的减小与Uo1的增大成正比关系, 减速所达到的最终结果是倾斜程度所决定的。
再看一下减速的过程: 电流放大板输出电流的存在或消失要经上升斜坡延时t u 和下降斜坡延时t d 。上升斜坡延时是指输出电流(平均值) 从0 达到某一稳定值(由Uo1 决定) 所需要的时间。下降斜坡延时是指控制信号Uo1 消失, 输出电流从这一稳定值减小至0 的时间, 详见图5 。在电流放大板上, 上升斜坡延时和下降斜坡延时可以分别调整,减速的平稳性由上升斜坡延时所决定, 上升斜坡延时越长, 输出电流的上升速率越小, 比例电磁铁移动到终止位置(由输出电流决定) 所用的时间就越长, 减速效果越平稳; 异而反之。比例电磁铁移动到某一终止位置后, 即完成减速的平稳过渡, 持续一段时间后, 倾翻力矩小于设定值或消失, 使Uo1减小或消失。若使Uo1减小, 则输出电流按t d 所决定的斜率下降, 直至为0 。假设Uo1 突然消失, 输出电流则经过t d 延时后为0 , 从而, 实现了减速后重新加速的平稳性。对于上升斜坡延时和下降斜坡延时, 亦应根据不同车型和系统参数决定。
电流放大板输出电流的大小通常采用脉宽调制(简称PMW) 技术获得, 由输入信号Uo1 决定输出电流波形的占空比, 改变电流的平均值, 这种直流电流中含有一定成份的颤振分量,可克服比例电磁铁的调节滞环, 提高位置控制精度。
4.1.3 减小油门开度减速系统与原车油门机构的连接由图3 和图4 可知, 减速系统的执行元件所产生的位移与原车油门踏板所产生的位移的方向是相反的, 当执行元件使油门开度减小时, 势必会使油门踏板抬起, 并要克服原车油门机构的阻力, 若驾驶员的脚踏在踏板上, 执行元件需产生较大的力量才能完成动作, 同时, 对传动机构中机械零件的强度、刚度也要提高要求, 使得减速系统不够完善。











评论