基于MM908E625和Low-G的汽车驾驶监控仪设计

1.数据库建立:
驾驶状态模糊控制器数据库的建立和数据更新是本课题设计的重要部分SOOQ.cn版权所有,汽车正常驾驶时,系统设定为连续驾驶的前两个小时为正常驾驶,在这段时间内监控仪的工作是对驾驶员的驾驶习惯进行数据搜集,按设定量化等级作数据的线性化量化,对应于油门开度、制动踏板位置和方向盘转向轴三种类型的变量的不同量纲,按比例因子对数据处理,依据模糊子集的隶属度函数模糊化数据。
为了消除大的误差,在量化级之间采用插值运算,引入权系数因子w(.),对于任意一个连续的测量值通过相邻的两个离散的加权运算得到模糊度的值。在模糊化数据建立数据库的基础上,生成正常驾驶习惯数学模型,并根据不断采集的数据进行修正。随着连续驾驶时间的增加(大于两个小时或采集数据的变化超出驾驶状态监控指标),监控仪自动进入疲劳驾驶监控状态。
2.软件框图
(1).PC机程序设计:
PC机程序用C语言编写,完成数据库的建立和维护、对LIN-BUS网络的管理、模糊控制器算法和规则的运算、交互界面的输入输出控制。软件框图如图(6)所示。
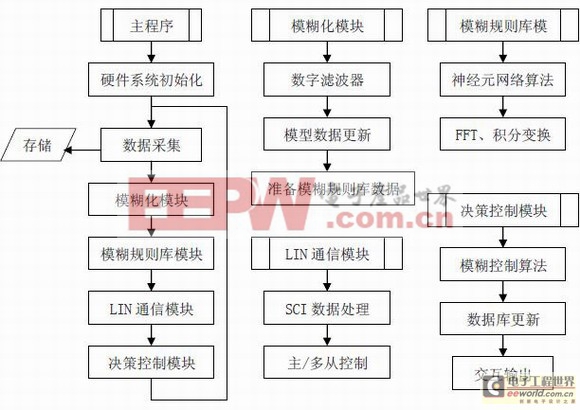
图(6)PC机软件框图
(2).测量模块程序设计:
测量模块是以MM908E625单片机为核心的数据采集器,程序用CodeWarrior3.1CW-HC083.0设计,测量模块软件框图如图(7)所示。
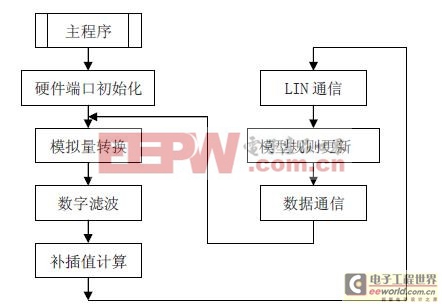
图(7)测量模块软件框图
结论
智能控制技术应用于汽车疲劳驾驶监控课题是一个相当复杂和具有相当难度的研究方向,通过对LIN-BUS网络的研究,以MM908E625、Low-G加速度传感器和其他传感器与嵌入式PC机建立起这样一个硬件平台,实现对汽车驾驶状态在正常驾驶、短距离驾驶、短时间驾驶的数据库的建立,规则库数据的修正,疲劳驾驶状态监控。对油门开度、制动踏板位置和方向盘转向轴等三种主要影响驾驶状态的因数,设计出模糊控制器,从理论和硬件实现两方面做了有益的探讨,虽然离实际应用和产业化有一定的距离,但是为进一步完善该系统的设计打下了良好的基础。





评论