自动控制系统的设计--基于根轨迹的串联校正设计

![]()
校正后系统的闭环传递函数可由Matlab中的G=feedback(Gc*G,1)得到:
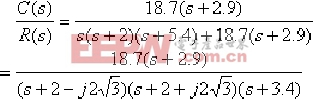
由上式可见,校正后的系统虽上升为三阶系统,但由于所增加的一个闭环极点![]() 与其零点
与其零点 ![]() 靠得很近,因而这个极点对系统瞬态响应的影响就很小,从而说明了
靠得很近,因而这个极点对系统瞬态响应的影响就很小,从而说明了 ![]() 确为系统一对希望的闭环主导极点。由于本例题对系统的静态误差系数没有提出具体的要求,故认为上述的设计是成功的。
确为系统一对希望的闭环主导极点。由于本例题对系统的静态误差系数没有提出具体的要求,故认为上述的设计是成功的。
例6-6 设一单位反馈控制系统的开环传递函数为
![]()
试设计一超前校正装置,使校正后的系统能具有下列的性能指标:超调量![]() %,调整时间
%,调整时间 ![]() 。
。
解:(1)作出校正前系统的根轨迹,如图6—21所示。
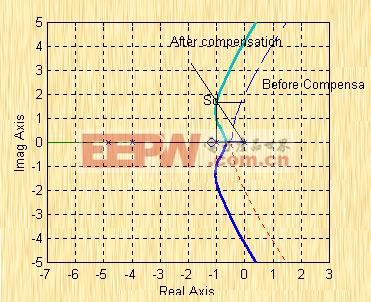 |
| 图6-21 |
(2)根据![]() ,解得
,解得 ![]() ,考虑到非主导极点和零点对超调量的影响,取
,考虑到非主导极点和零点对超调量的影响,取 ![]() 。又由
。又由 ![]() ,求得
,求得 ![]() 。进而求得系统的一对希望的闭环主导极点
。进而求得系统的一对希望的闭环主导极点 ![]() 。
。
(3)根据求得的主导极点,计算超前校正网络在![]() 处应提供的超前角为
处应提供的超前角为
![]()
(4)由于![]() 的开环极点正好落在希望闭环极点
的开环极点正好落在希望闭环极点 ![]() 下方的负实轴上,因此可采用第一法进行校正。把
下方的负实轴上,因此可采用第一法进行校正。把 ![]() 的零点设置在紧靠
的零点设置在紧靠 ![]() 这个开环极点的左侧。如设
这个开环极点的左侧。如设 ![]() ,则
,则 ![]() 的极点落在以
的极点落在以 ![]() 为顶点,向左作角
为顶点,向左作角 ![]() 的负实轴交点上,
的负实轴交点上, ![]() ,即为所求
,即为所求 ![]() 的极点。
的极点。
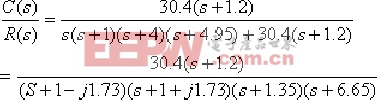
(5) 校正后系统的传递函数为
![]()
由根轨迹的幅值条件,求得系统工作于 点处的K值为30.4。这样,上式便改写为
![]()
据此,求得校正后系统的静态速度误差系数
![]()
如果希望![]() 值有少量地增大,则可通过适当调整
值有少量地增大,则可通过适当调整 ![]() 零点和极点的位置来实现,但这种调整有可能会破坏
零点和极点的位置来实现,但这种调整有可能会破坏 ![]() 的主导作用。
的主导作用。
(6)它的闭环传递函数为:
或直接由如下的Matlab命令得到:
zpk(feedback(G0*Gc,30.4))
Zero/pole/gain:
(s+1.2)
------------------------------------------
(s+6.631) (s+1.347) (s^2 + 1.972s + 4.085)
下面检验希望闭环极点 ![]() 是否符合主导极点的条件。不难看出,由于闭环系统的一个极点与零点靠得很近,故它对系统瞬态响应的影响很小,同时由于另一极点
是否符合主导极点的条件。不难看出,由于闭环系统的一个极点与零点靠得很近,故它对系统瞬态响应的影响很小,同时由于另一极点 ![]() 距s平面的虚轴较远,因而这个瞬态分量不仅幅值小,而且衰减的速度也快。由此得出,上述设计的超前校正装置能使
距s平面的虚轴较远,因而这个瞬态分量不仅幅值小,而且衰减的速度也快。由此得出,上述设计的超前校正装置能使 ![]() 成为系统希望的闭环主导极点。
成为系统希望的闭环主导极点。
上面两个例题均对静态误差系数没有特殊要求,否则,宜采用如下方法,即第三法。
例6-7 有一单位反馈系统,其开环传递函数:![]() ,设计一超前校正装置,满足如下性能指标:静态误差系数
,设计一超前校正装置,满足如下性能指标:静态误差系数 ![]() ,闭环主导极点位于:
,闭环主导极点位于: ![]() 处。
处。
解:(1)绘制未校正系统的根轨迹,并根据静态误差系统,确定开环增益:
![]() ,
, ![]() ,
,
(2)根据幅值确定法,并代入![]() :
:

![]()
超前校正装置应提供的超前角度:
![]()
相关推荐技术专区 |







评论