基于FPGA的运动估计设计

2.3 减法器模块
减法器模块主要是完成当前块像素点值和参考块像素点值之间的作差,并将做差结果进行取绝对值运算。本减法器是采用9个LPM(参数化模块库)元件库中的减法器合成的。而LPM中的减法器将被减数和减数明确地分开了。因此,在将当前块和参考块像素点值输入到减法器之前先对二者进行比较,再分别输入到减法器的被减数和减数端口。这样当减法器设置为无符号数运算时,输出结果就相当于取了绝对值的差
值。从时钟周期的角度发现,整个减法器在256x9个时钟周期内是都在运行的,但是所要采集的有用信号仅仅是9个独立的256个时钟周期,即每个减法器仅仅使用256个时钟周期的有用信号,其他时钟周期内的信号对于其他减法器是有用信号,但是对于本减法器却是干扰信号,必须要消除。这就是在参考块分频器里面引入当前块信息的原因。
2.4 累加比较器模块
累加比较器主要是完成对每个减法器输出的取过绝对值的差值信号的累加,并将累加结果进行比较输出最佳运动矢量。累加比较器的设计和减法器的设计有很大关系,除了在上述的取绝对值方面二者相互要求比较严格之外,在时序方面,二者也有很大关联。9个减法器在参考块分频器模块的作用下,工作于所有的时钟周期里面,而累加比较器则是以减法器输出的信号作为累加原材料的,这就使得累加比较器也必须从时钟的起始点就开始工作。确定运动矢量的标准是SAD最小值。也就是要通过比较9个累加结果,确定出最小值,并由地址计数器模块找到这个最小值所对应的运动矢量。
2.5 整体方案
整体方案主要是将三步搜索法中的三步分开进行。在外部输入信号的控制下,先输入第一步搜索的地址计算控制因子,使得寻址范围是在步长为4的9个数据块群里面,第一步搜索完成时将第一步搜索到的最佳运动矢量输入到第二步的搜索中,完成机制和第一步唯一的区别就是地址计算和产生的寻址范围不同,这样一直到完成第三步搜索时,将第三步搜索得到的最佳运动矢量作为当前块在这个搜索窗口里面的最佳运动矢量。
3 实验结果与分析
本设计采用Stratix II系列的EP2S15F484C3器件进行仿真,仿真结果如图6所示。本文引用地址://www.cghlg.com/article/190177.htm
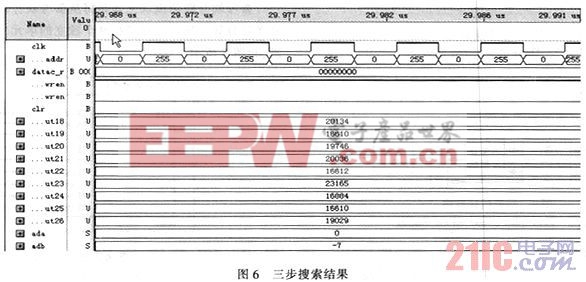
由仿真结果可知整个搜索过程完全符合时序要求,总的逻辑资源占用率是27%。组合查找表使用了2 169个,占总数量12 480的17%。专用逻辑寄存器使用了2 855个,占总数量12 480的23%。而用的总的寄存器数也就是2 855。使用了180个片上引脚,占总个数的52%。使用了86 088比特的块存储器单元,占总的快存储器数量的21%。搜索到的最佳运动矢量(0,-7),由前两步的搜索结果可知其完全正确。
4 结束语
本文中采用FPGA设计的运动估计方案无论在搜索速度,资源利用还是时序控制上都具有一定的优越性,可以大大提高视频编码器设计的性价比。另外,随着半导体工艺的不断进步,FPGA的性价比将不断提高,将使得运动估计乃至视频编码的技术不断提高。











评论