基于AVR和51单片机的机器鱼语音控制系统设计与实现

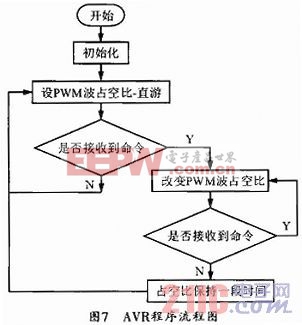
AVR是鱼体主控芯片,它的软件主要包括主程序,串口初始化(波特率和串口模式需要同上一致,还设置接收中断打开状态),产生使机器鱼直游的PWM波,无论在什么状态,只要串口接收到命令就会产生中断,就需要根据命令改变PWM波的占空比,从而改变机器鱼的游动方向,需要注意的是在改变PWM波占空比以后,只需要保持此占空比一段时间(该时间段内有可能有新的命令),在鱼体改变方向以后就需要再次将占空比改为直游。AVR控制流程如图7所示。本文引用地址://www.cghlg.com/article/170958.htm
4 实验结果
此语音控制系统在实验中已经得到实现。我们在51单片机中编辑了“zuo”、 “you”、 “qian”等命令:在AVR单片机的接受中断编辑了相应命令的PWM波占空比;所有串口通讯参数设置为:波特率9600bps;串口模式为8个数据位,1个停止位,无校验位;频道设置为28;发射功率设为最大(FF)。使用了奥林巴斯ME52的麦克风作为语音接收设备。

表1是鱼在直游(前)的时候,三个舵机在十个离散周期各自的转角。在转向的时候,前两个舵机偏转,第三个舵机保持不变;在进行“左”转命令时,舵机1和舵机2在直游基础上加上负40°;“右”转时加上正40°。由于舵机转角与PWM波占空比是线性关系,在此基础上,我们匹配了PWM波占空比与舵机转角的数学关系式
![]()
jiaodu是定义的直游时各舵机的转角数组,j是舵机号,i是周期,pianjiao是左转右转等附加给直游时的角度(正负40°);xiuzheng是实际中需要调试的补偿角度。
实际操作中,当发出“左”、 “右”、 “前”等命令时,机器鱼会立即做出相应的动作。
5 结束语
文中主要介绍了语音识别技术在机器鱼上的应用以及鱼体波的产生原理,实现了语音控制机器鱼的游动方向,相信随着机器鱼的研究深入,可以在语音系统基础上实现更多功能,使机器鱼更加趋于智能化,最终可以为人类探索海洋提供更多帮助和便利。











评论