基于AVR和51单片机的机器鱼语音控制系统设计与实现

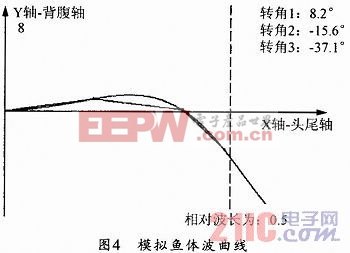
根据实际鱼体选择合适的鱼体波参数,通过仿真工具模拟出一个摆动周期内i从0~N的所有鱼体波,就可以计算舵机在各种情况下所需转动的角度,然后就可以设定各个舵机的PWM波占空比,就可以产生所需要的鱼体波。本文设定参数为c1=0.05;c2=0.09;k1=0.5;k2=0.1;N=10的一条鱼体波曲线如图4,直线段为实际中三节舵机配合形成的鱼体波,曲线为理想鱼体波曲线。本文引用地址://www.cghlg.com/article/170958.htm
使用AVR的USART0与无线通信模块连接。当51单片机通过无线通讯模块将数据传送到AVR时,AVR单片机软件控制会产生一个串行中断,此时可以判断接收到的命令,根据命令改变PWM波的占空比,从而改变机器鱼的游动方向。
2.4 WAP200B无线通讯传输部分
无线模块WAP200B总共有10个管脚:VCC_CPU为MCU电源输入,VCC_RF为RF短路电源,VCC_PA为RF功放电源,它们三个管脚接DC3.3V;SET为配置或者正常工作模式选择信号输入管脚,低电平时WAP200B为配置模式,此时串口的数据作为配置指令而不会被传送出去,高电平(3.3V)时模块使能接发功能;RXD/TXD是串口数据从WAP200B输入/输出的管脚,3.3V/5V兼容TTL逻辑电平,RESET为复位信号输入管脚,正常工作接高电平;ANTENNA为天线接口。连接方式如图5所示。
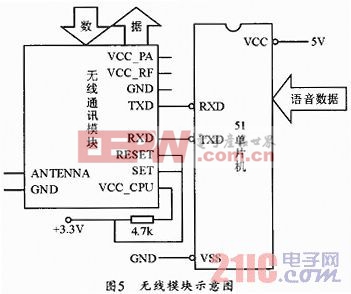
无线通讯模块的TXD/RXD分别与51单片机的RXD/TD相连,就相当于51单片机的一个串口。在使用无线通汛模块之前,需要配置它的波特率、串口模式、频道以及发射功率(SET置低),两个互相通讯的模块必须保证具有相同的波特率和频道,同时51单片机串口的波特率也必须和通讯模块一致,发射功率可以根据发射的距离远近设定。
3 控制软件设计流程
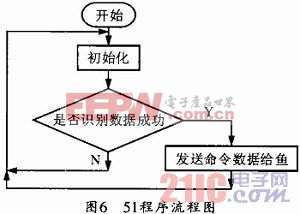
51单片机是语音芯片的主控CPU,它的软件主要包括主程序,串口初始化(波特率和串口模式设定需要和无线通讯模块一致),语音系统的识别控制,命令数据的发送。51程序流程如图6所示。











评论