模糊PID控制器的设计与仿真研究

3 SIMULINK仿真
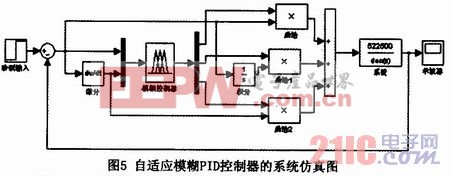
打开MATLAB文件编辑器,编写M文件。在M文件中创建模糊控制系统接口,增加模糊语言变量(二个输入、三个输出),并设定各变量的论域及模糊推理规则,给定输入,根据模糊推理得到输出。编写出模糊控制规则fuzzypid.fis。运行所编写的模糊控制规则,并将控制规则导入工作空间。在MATLAB/SIMULINK环境下,建立仿真模型,并将Fuzzy Logic Controller模块的参数设定为fuzzypid.fis,就建立了系统的模糊PID参数自调整系统。
设被控对象的传递函数为
建立系统的SIMULINK模型如图5所示。本文引用地址://www.cghlg.com/article/162201.htm
设定PID参数的初始值分别为kp=0.35,ki=0.0,kd=1,并在第0.32s时加上数值为1的强干扰,采用模糊自适应PID控制的阶跃响应如图6所示。
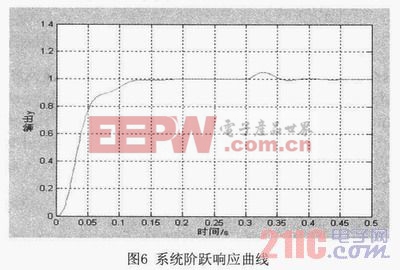
从仿真结果可以看出,模糊自适应PID控制器系统具有良好的快速性和稳态控制精度,并且抗干扰能力强。在常规PID算法的基础上,通过计算当前系统误差e和误差变化率ec,应用模糊控制推理系统,查询模糊矩阵表对系统进行参数调整,在动态过程中改变PID的参数,较好地发挥了两种控制方式的优点,提高了系统的控制质量。同时,在系统仿真实验过程中,可以看出应用SIMULINK仿真软件的方便之处,仿真简单、速度快,而且模糊控制规则以及系统的论域、隶属度函数调整方便,容易实现。
4 结语
采用模糊自适应PID控制算法,系统的响应速度加快,控制精度提高,稳态性能变好,而且几乎没有超调和震荡,鲁棒性好。这是单纯的PID控制难以实现的,而且采用模糊PID控制的显著特点是在同样精度要求下,系统的过渡过程时间变短,灵敏度提高,这些具有重要的实际应用价值。

pid控制器相关文章:pid控制器原理









评论