模糊PID控制器的设计与仿真研究

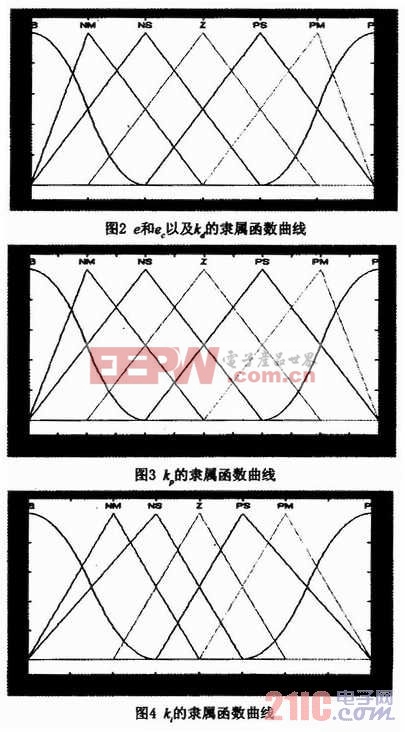
在系统分析的基础上,将系统偏差e和偏差变化率ec作为模糊控制器的输入,PID控制器的三个控制参数kp,ki,kd作为输出。设定输入变量偏差e和偏差变化率ec语言值的模糊子集为{负大,负中,负小,零,正小,正中,正大},并简记为{NB,NM,NS,Z,PS,PM,PB}。输入输出变量的隶属度曲线如图2~图4所示。偏差e和偏差变化率ec的论域定为[-3,3],输出参数kp的论域定为[-0.3,0.3],ki的论域定为[-0.08,0.08],kd的论域定为[-3,3],隶属度函数NB、PB选为高斯函数,其余选为在论域范围内均匀分布、等距离的三角函数。本文引用地址://www.cghlg.com/article/162201.htm

pid控制器相关文章:pid控制器原理









评论