小型遥控转台系统设计

2.3 程序设计
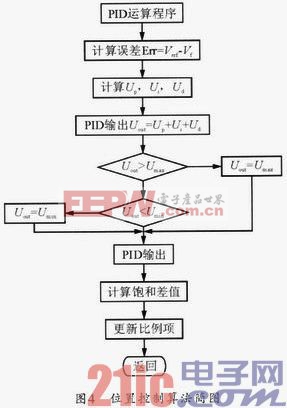
云台驱动执行机构部分的控制程序主要流程是:上电初始化nRF403后,接收旋钮旋转幅度和方向的译码指令,以30 ms为周期执行指令扫描以及电机角度信号采集;角度数字量化后,折算为旋转目标角度和当前实际角度的相对误差;计算需要旋转的速度;驱动执行PWM波可以通过内部定时器,由I/O产生PWM波,载波频率为20 kHz,不同速度对应不同的占空比信号,和另一路I/O产生电机旋转的方向信号,写成速度控制函数;简易的位置闭环算法如图4所示,实验证明PID调节基本可以快速和稳定的完成摄像头定位功能。本文引用地址://www.cghlg.com/article/159467.htm
3 操作控制器设计
3.1 硬件电路设计
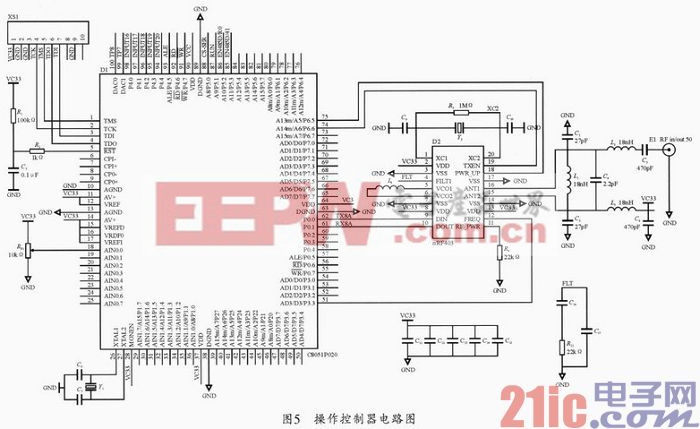
遥控操作控制端,同样采用Silicon公司的C8051F020单片机作为微控制器,原理图如图5所示,旋钮操作采集需要转动指令信号读入单片机A/D接口,由端口AIN0.0的A/D采样,转化为转动幅度值,单片机扫描到该控制量后,将其编码,以30ms周期发送数据,送至nRF403模块DOUT,这样指令就经过模块nRF403无线调制发射出去。单片机P6.6端口的控制信号TXEN端口的值设置TXEN=“1”时为发射状态。在工作过程中,C8051F020单片机的P0.0与nRF403的DIN端口相连接,P0.1与nRF403的DOUT相连接。FREQ、F_PWR和TXEN分别由C8051F020单片机的其他管脚控制。接口关系如图5。进行遥控操作时,需要发送的数据经过C8051F020单片机的P0.1也就是TXD端到达nRF403芯片的DIN端。协议与驱动云台端互为编码解码方式。
3.2 程序设计
遥控端的程序功能,主要是采集旋钮旋转幅度和方向,通过端口AIN0.0的A/D采样,应用系统自带的A/D设置模块,计算实时旋转量,相对满幅值进行量化,满幅值对应镜头旋转360度。通过P0.0和P0.1模拟通信数据时序,发送数据到nRF403的DIN端,经过调制发送给驱动执行机构。因此其程序主要任务是对旋钮旋转幅度数字量化,然后并按协议发送数据,无线调制发射信号。
4 结束语
本文论述了搭建单片机和LMD18200的运动控制平台,并通过无线收发芯片nRF403完成了遥控摄像机转台的控制功能。结果表明系统的快速性和稳定性都较好,完全能满足商用的基本要求。










评论