小型遥控转台系统设计

摄像摇臂经常在噪声小的环境中应用,因此云台的运行噪声必须尽可能低,选用优质的直流电机是设计的关键。根据市场调研,设计中采用MAXON公司的有刷直流减速电机(尺寸:直径25mm,轴长22 mm,轴径3 mm,额定电压12 V)。摄像头转动控制旋钮内接精密10 K电位器,旋钮左有旋转与摄像机左右旋转同步,其实质是用电位器来控制直流电机正反转和闭环调速。本文引用地址://www.cghlg.com/article/159467.htm
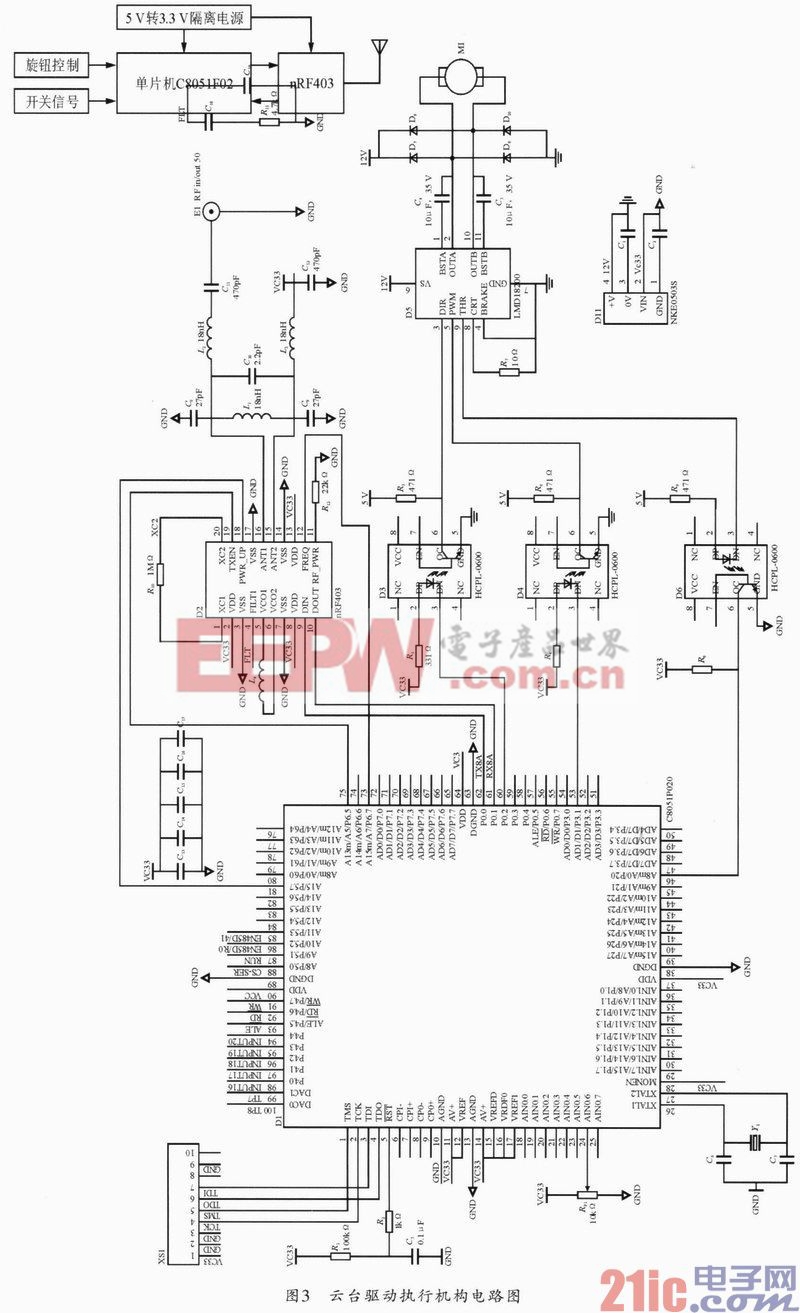
该系统电路图如图3所示。单片机P0.2和P3.1两个端口分别输出旋转信号和PWM波电机控制信号。PWM控制信号经过光耦后输入LMD18200的引脚5,而转向信号则通过引脚3输入。根据PWM控制信号的占空比来决定直流电机的转速。LMD18200提供双极性驱动方式和单极性驱动方式。双极性驱动是指在一个PWM周期里,电动机电枢的电压极性呈正负变化。双极性可逆系统虽然有低速运行平稳性的优点,但也存在着电流波动大,功率损耗较大的缺点,尤其是必须增加死区来避免开关管直通的危险,限制了开关频率的提高,因此只用于中小功率直流电动机的控制。单极性驱动方式是指存一个PWM周期内,电动机电枢只承受单极性的电压,电机的转速大小只与PWM的占空比有关,占空比越大,转速越大。这里采用单极性驱动方式,当PWM的占空比等于0时,电机静止;当PWM的占空比大于0时,电机转动。通过改变占空比,可以实现电机的调速,改变电机的方向控制信号(高低电平)来控制电机的转向。驱动电路的PWM、方向信号和报警信号,通过高速光电耦合器HCPL0600的隔离和电压转换后,输入或输出到单片机。
图3表明了采用直流电机定频调宽PWM调速方式,PWM信号为单极性工作制。图3中电位器RP1的中间滑动端接到C8051F020单片机自带A/D模块端口AIN0.6,它是电机尾部同轴向的角度化置反馈信号,可与控制指令形成闭环位置反馈,从而达到精确控制电机调速目的,其基准电压为3.3 V,从单片机的VREFD,VREF0,VREF1端口引入。满幅值对应电机末端旋转一周。另外驱动过热保护信号也接入单片机P2.0端口,随时停止电机运转保护机构。
遥控部分由nRF403芯片实现:芯片的9脚及10脚:DIN输入数字信号和DOUT输出数字信号均为标准的逻辑点频信号,需要发射的数字信号通过DIN输入,解调出来的信号经过DOUT输出。12脚通道选择:FREQ=“0”为通道#1(433.92 MHz),FREQ=“1”为通道#2 (315.16 MHz),接到单片机P6.7。18脚电源开关:PWR_UP=“1”为工作模式,PWR_UP=“0”为待机模式,接到单片机P5.7,而19脚发射允许,这里设置TXE N=“0”为接收模式,接到单片机P6.5,本电路板主要用于接收控制信号,指令解调出来的信号经过DOUT采入单片机。
2.2 布板设计
实现无线遥控的nRF403芯片采用了晶体振荡和PLL合成技术,由压控振荡器输出的信号直接送到功率放大器,从功率放大器提供的射频输出到天线。单端天线列接到nRF403时,使用印刷电路板(PCB)的设计直接关系到射频性能。为了实现较好的性能,使系统达到预期的结果,PCB要使用双面板来实现,即元件面和底面。为了防止各个模块之间相互影响,无线接收模块与控制模块尽量分开布置,控制与驱动两部分电源隔离。射频电路的电源要使用高性能的射频电容去耦,并且所使用的去耦电容要尽可能与nRF403的VDD端靠近,一般还要在大容量面所安装的电容旁并联一个小电容。为了达到减少分布参数的影响,PCB在设计时要避免电源线过长,要使各器件紧靠芯片周围,所有元件地线、VDD连线等围绕nRF403芯片。除此之外,射频电路的电源也要与接口电路的电源分离。nRF403的VSS端直接接到接地面(PCB板的两面最好敷铜接地,将两层的敷铜用较多的过孔紧密相连,然后再把VSS引脚连接到敷铜面)。另外,需要注意的是,不要将数字信号、开关信号或者控制信号经过PLL回路滤波器元件和电感,以保障PLL环路滤波器电压的正常。使用中的注意事项:nRF403的工作电压为3.3 V,因此要在与控制器连接时应注意电平匹配的问题。接收模式接收到的数据可以直接送到单片机的接口或者经过点频转换以后送给处理器。在待机模式情况下,电路有电流但是不接受和发射任何数据。










评论