首页
betway体育官网
深度报道
论坛
在线研讨会
业界动态
设计应用
牛人业话
暴力拆解
EEPW观点
EETV
电子方案
资源下载
博客分类
嵌入式系统
元件/连接器
电源与新能源
安防与国防
汽车电子
EDA/PCB
消费电子
工控自动化
模拟技术
医疗电子
测试测量
手机与无线通信
光电显示
网络与存储
智能计算
物联网与传感器
EEPW
»
博客首页
» 汽车电子
汽车电子
手把手教你搭建OpenScenario交通场景(下)
在《手把手教你搭建OpenScenario交通场景(上)》中,我们已经介绍,在动力学仿真软件ModelBase中对车辆、行人、物体和RSU四类实体~~~
hiraintech
2024-11-18 17:48
擎耀数字车灯CAN/LIN总线网络定向数据采集控制解决方案实施流程
2024年是数字车灯崛起的元年,随着车辆的智能化和网络化程度不断提高,车载网络系统(如CAN总线)成为连接各个电子控制单元(ECU)的重要纽带。车灯作为车辆重要的安全组件之一,其工作状态直接影响到行车~~~
suruide
2024-11-18 15:52
一文读懂远程控制协议—Remote Control Protocol
随着中央计算+区域控制的中央集中式架构广泛应用,10BASE-T1S技术逐渐得到各方关注,总线型及半双工的特性让10BASE-T1S在成本和功耗上~~~
hiraintech
2024-11-11 17:47
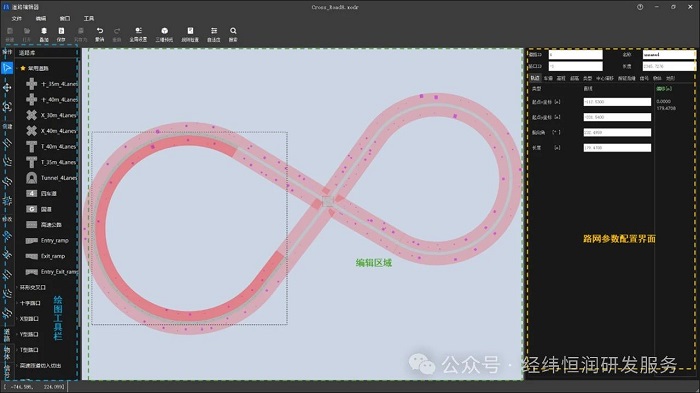
手把手教你搭建OpenDRIVE道路模型(上)
OpenDRIVE作为一种高度专业化的道路建模标准格式,采用XML数据语言构建,其核心优势在于能够精确且详尽地刻画道路网络的几何特征,包括但不限于~~~
hiraintech
2024-11-11 17:44
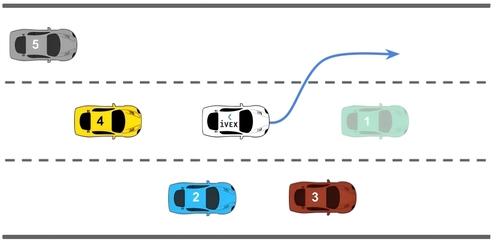
自动泊车端到端算法 ParkingE2E 介绍
01 算法介绍自主泊车是智能驾驶领域中的一项关键任务。传统的泊车算法通常使用基于规则的方案来实现。因为算法设计复杂,这些方法在复杂泊车场景中的有效性较低。相比之下,基于神经网络的方法往往比基于规则的方~~~
地平线开发者
2024-11-09 10:13
自动泊车端到端算法 ParkingE2E 介绍
01 算法介绍自主泊车是智能驾驶领域中的一项关键任务。传统的泊车算法通常使用基于规则的方案来实现。因为算法设计复杂,这些方法在复杂泊车场景中的有效性较低。相比之下,基于神经网络的方法往往比基于规则的方~~~
地平线开发者
2024-11-08 21:36
一文读懂远程控制协议—Remote Control Protocol
随着中央计算+区域控制的中央集中式架构广泛应用,10BASE-T1S技术逐渐得到各方关注,总线型及半双工的特性让10BASE-T1S在成本和功耗上~~~
hiraintech
2024-11-08 21:05
对通用骨架提取方法的改进
01 骨架提取的任务引入骨架(或中轴线)具有在二进制形状和自然图像中提供紧凑而有意义的对象表示的潜力(以下简称为“形状”和“图像”),适用于图像表示和各种多媒体应用。在实践中,对象骨架通常以图形格式编~~~
地平线开发者
2024-10-27 14:20
征程 6 环视快启 sample
01 功能概述环视 4V 解串器直接接到 main 域,mcu 访问 main 域 i2c、gpio、lpwm,对 camera sensor、serdes 以及 lpwm 进行初始化,完成环视的快速~~~
地平线开发者
2024-10-27 14:01
征程 6E DISPLAY 功能介绍及上手实践
01 功能概述本文将带大家一起实现单路、多路 MIPI CSI TX 输出、IDU 回写、IDU oneshot 模式、绑定输出 VPS 数据等功能,此处主要介绍各 sample 的实现与使用方法。0~~~
地平线开发者
2024-10-27 13:51
地平线与英伟达工具链 PTQ 工具功能参数对比与实操
1.理论简介在阅读本文之前,希望大家对 PTQ(Post-Training Quantization) 训练后量化有一定的了解~地平线 OpenExplorer 和 NVIDIA TensorRT 是~~~
地平线开发者
2024-10-27 13:44
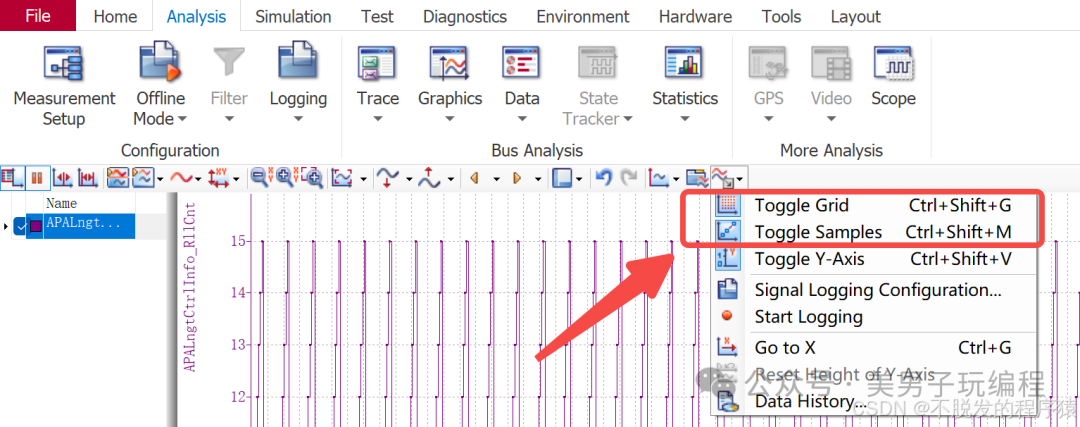
CANoe查看CAN报文发送周期
在CANoe软件中,Analysis -> Select other options 下的 Toggle Grid 和 Toggle Samples 选项确实用于控制分析窗口中的显示方式和采样行~~~
美男子玩编程
2024-10-25 14:04
康谋分享 | AD/ADAS的性能概览:在AD/ADAS的开发与验证中“大海捞针”!
如果您希望从数百万小时的驾驶数据中查找特定的相关驾驶事件和未遂事故,以确保您的所需功能正确运行,最好的方法就是创建一个系统性能的概览分析,实现在数据日志中快速检索关注点。为此,康谋在本文将为您详细介绍~~~
康谋自动驾驶
2024-10-21 10:12
地平线轨迹预测 QCNet 参考算法-V1.0
该示例为参考算法,仅作为在 征程6 上模型部署的设计参考,非量产算法。01 简介轨迹预测任务的目的是在给定历史轨迹的情况下预测未来轨迹。这项任务在自动驾驶、智能监控、运动分析等领域有着广泛应用。传统方~~~
地平线开发者
2024-10-18 11:32
征程 6E/M 快速上手实战 Sample-IPC
关于本文在此篇文章中,我们将深入探讨 征程6X 系列核间通信(IPC-F)的基本原理,并通过示例代码演示如何有效地使用 IPC-F 来实现 Acore 和 Rcore 之间的高效数据传输。无论你是刚刚~~~
地平线开发者
2024-10-18 11:32
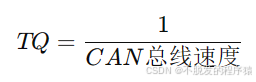
如何调整CAN位宽容忍度?
CAN位宽容忍度是指在控制器局域网络(CAN, Controller Area Network)中允许时钟同步的误差范围。这是CAN网络正常通信时的关键因素之一,因为CAN协议依赖位同步来确保多个节点~~~
美男子玩编程
2024-10-17 10:01
无人驾驶车辆的"网络秘密",联网可不是个简单的事儿
提到无人驾驶,大家首先想到的可能是车载摄像头、激光雷达等各种先进的传感器。但你知道吗,支撑无人车稳定行驶的另一个关键,就是车辆与外界的网络连接。没有高速稳定的网络,无人车就像是一个失聪的司机,无法感知~~~
grandision
2024-10-16 17:57
英飞凌荣获威睿“卓越贡献奖”
Infineon News近期,极氪智能科技的子公司—威睿电动汽车技术(宁波)有限公司2023年度供应商伙伴大会在杭州国际博览中心顺利召开。来自全球600余家新能源供应商的近千位代表到场参会。英飞凌作~~~
hejingfeng
2024-10-16 11:41
英飞凌与吉利汽车集团成立创新应用中心,共同推动节能智能化电动汽车发展
Infineon News近日,全球汽车半导体领导厂商英飞凌科技与中国领先的汽车制造商吉利汽车集团成立创新应用中心,双方将深化在智能汽车等领域的长期合作,共同聚焦客户需求,加速新产品新方案落地。创新应~~~
hejingfeng
2024-10-16 11:32
英飞凌在汽车半导体行业的领先优势扩大,首次领跑全球汽车MCU市场
英飞凌科技股份公司在2023年持续扩大其在汽车半导体市场的领先优势。TechInsights 的最新研究显示,2023年全球汽车半导体市场规模增长16.5%,创下692亿美元的记录。英飞凌的总市场份额~~~
hejingfeng
2024-10-16 11:26
1
2
3
4
5
6
»
›|
发表文章
业界动态
研华发布RK3588 SMARC 2.1核心模块ROM-6881助力机器视觉应用智能升级
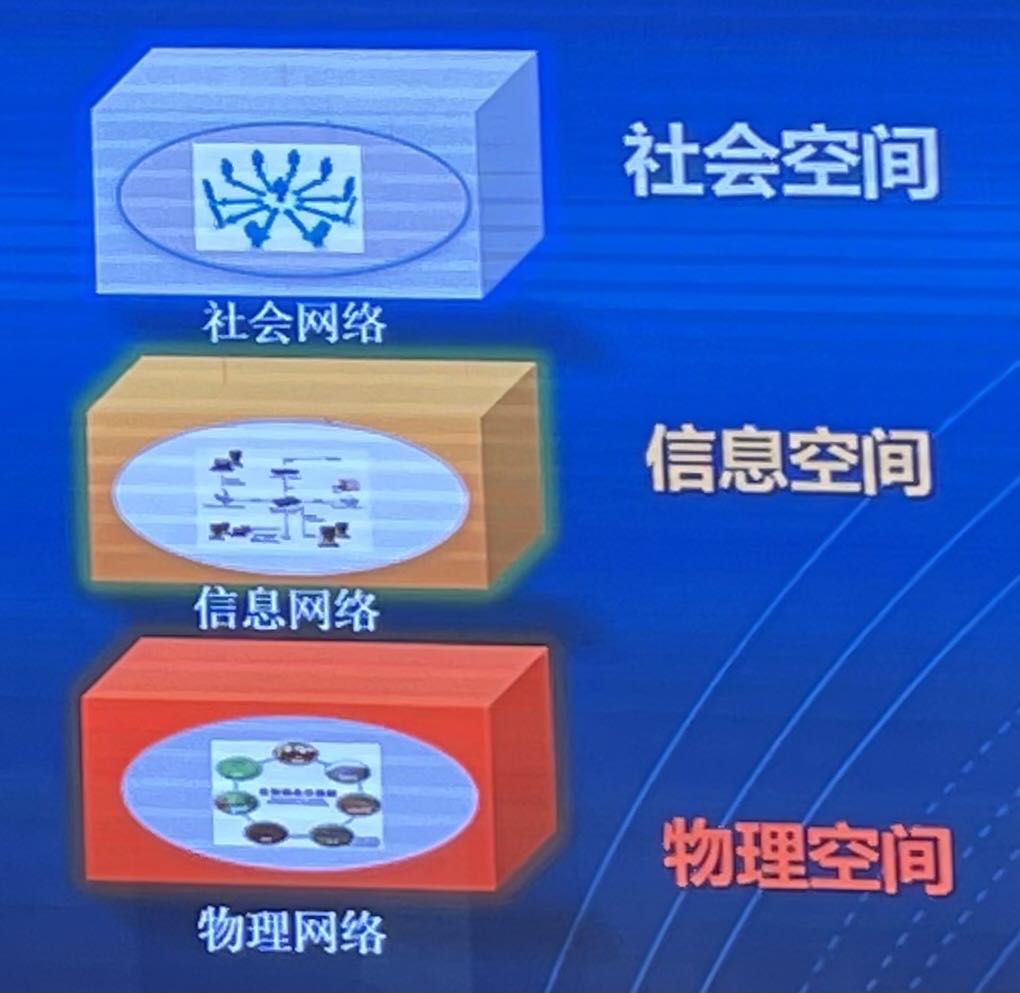
"人-机-物智能"的挑战、思考及应用实践
以中国半导体市场的活力助推ERS快速成长
助力新能源汽车企业把驾驶汽车变得更安全、更环保、更互联
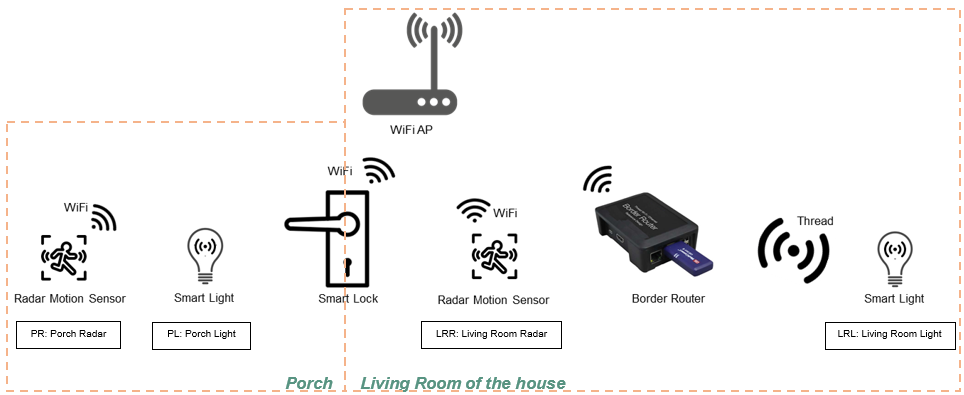
基于PSoC™ 6 Matter的智能家居解决方案
资料下载
电动汽车电机控制器资料下载
电动汽车电机驱动技术
新能源汽车电机电池电驱动综合仿真与最佳实践
搭建快速而准确的新能源汽车动力总成系统模型
微距无线充电器的设计
绿色开关电源设计要点
STM32H7S78-DK LED
Ai-Arithmetic-v1.0
专栏作者
电子禅石的空间
芯智讯的空间
芯股婶的空间
美男子玩编程的空间
传感器技术的空间
旺材芯片的空间
英飞凌汽车电子生态圈
芯谋研究的空间
深科技的空间
物联传媒的空间