电机驱动芯片A4950及H桥电路分析

全面解析电机驱动芯片A4950及H桥电路,主要分为以下几个方面:
本文引用地址://www.cghlg.com/article/202405/458606.htm一、H桥电路基础知识
二、什么是A4950
三、A4950引脚封装和功能框图
四、A4950模块使用说明
五、A4950逻辑控制
六、总结
一、H桥电路基础知识
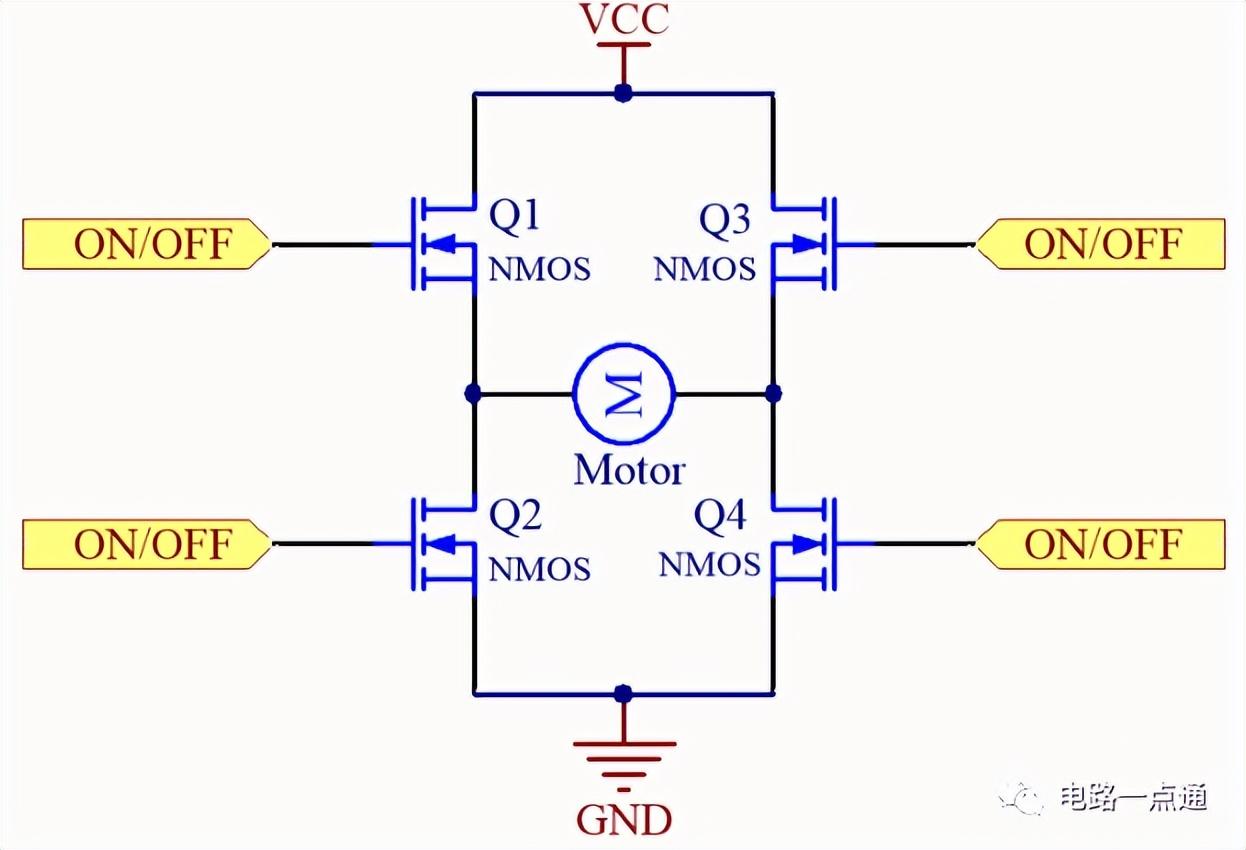
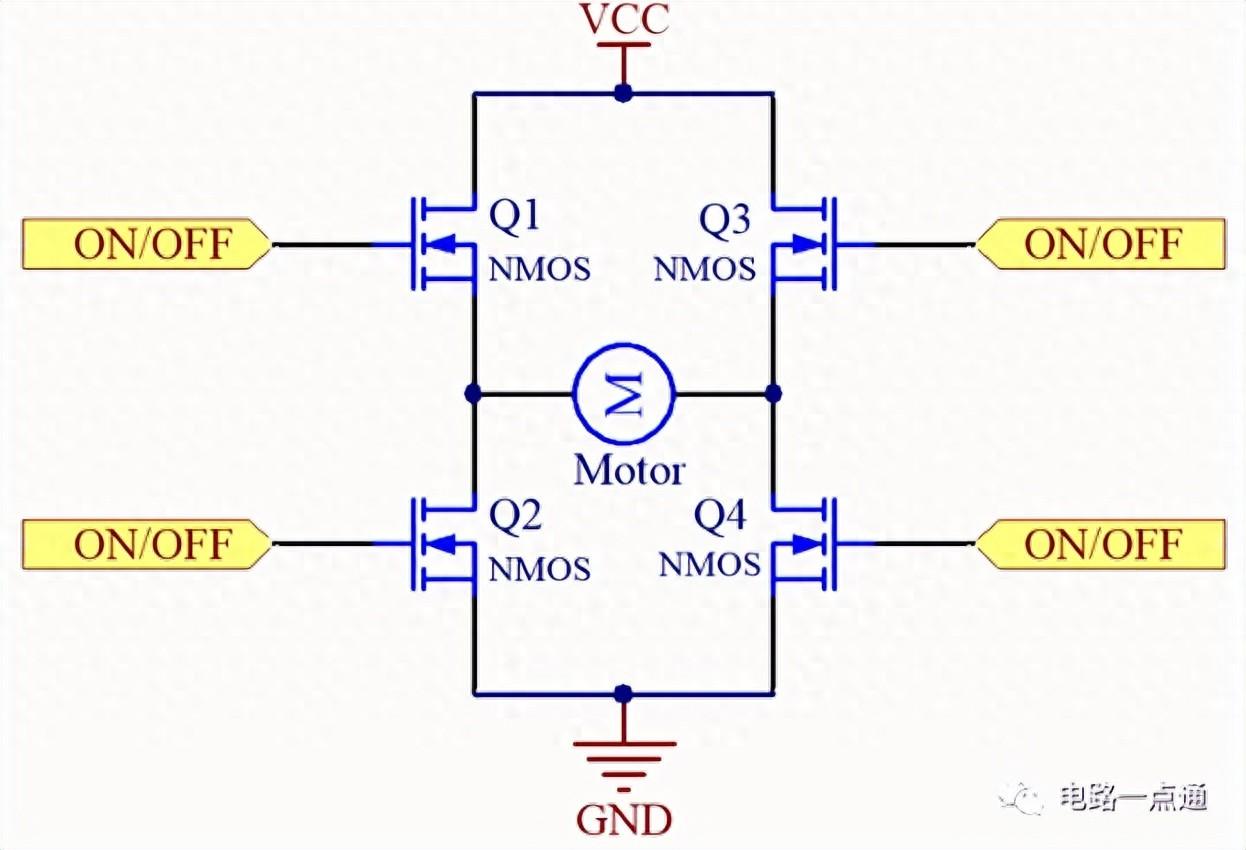
1.原理图(以全NMOS管为例)
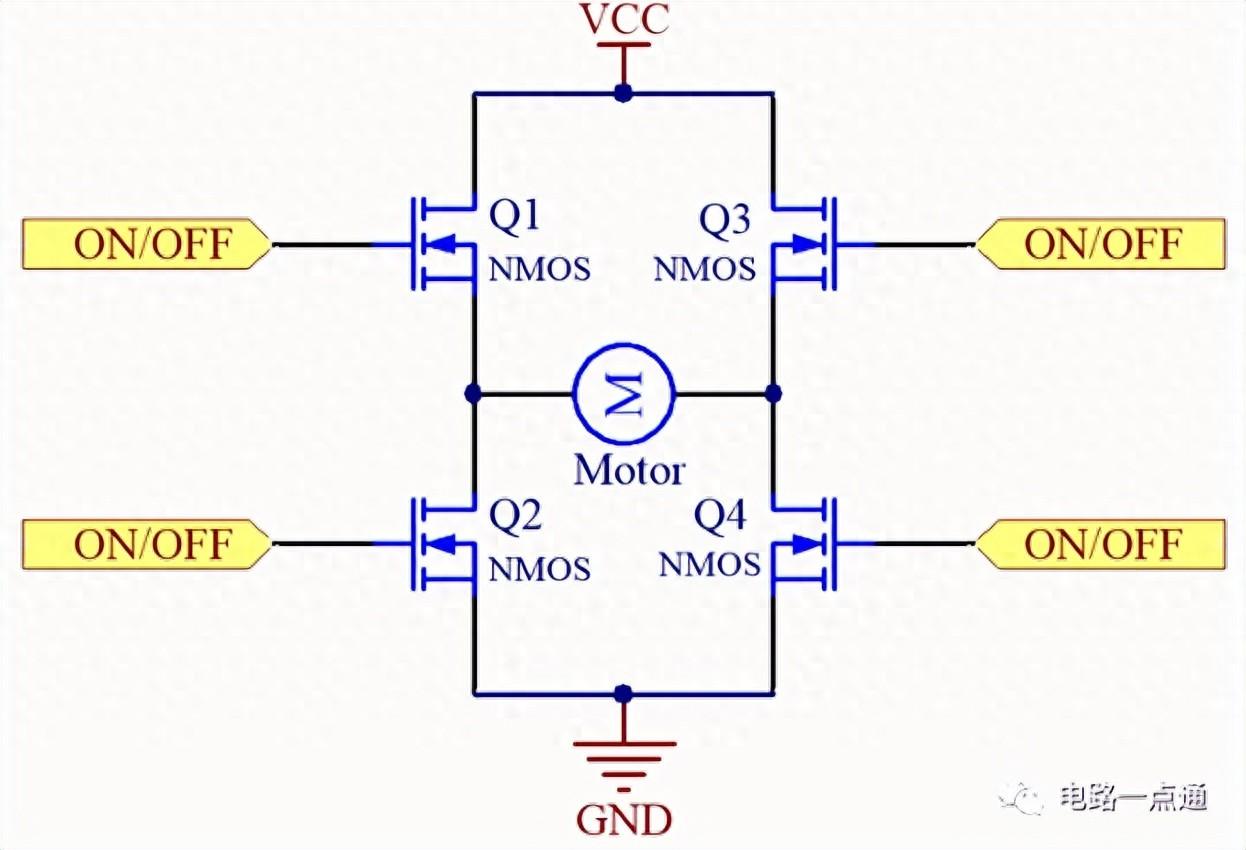
从上图可看出,此电机驱动电路由4个NMOS管构成,形如H型,故名为H桥电路。通过控制4个MOS管的导通与截止达到对中间电机的不同控制效果。NMOS管的栅极为高电平时导通,低电平时截止。
2. H桥工作模式
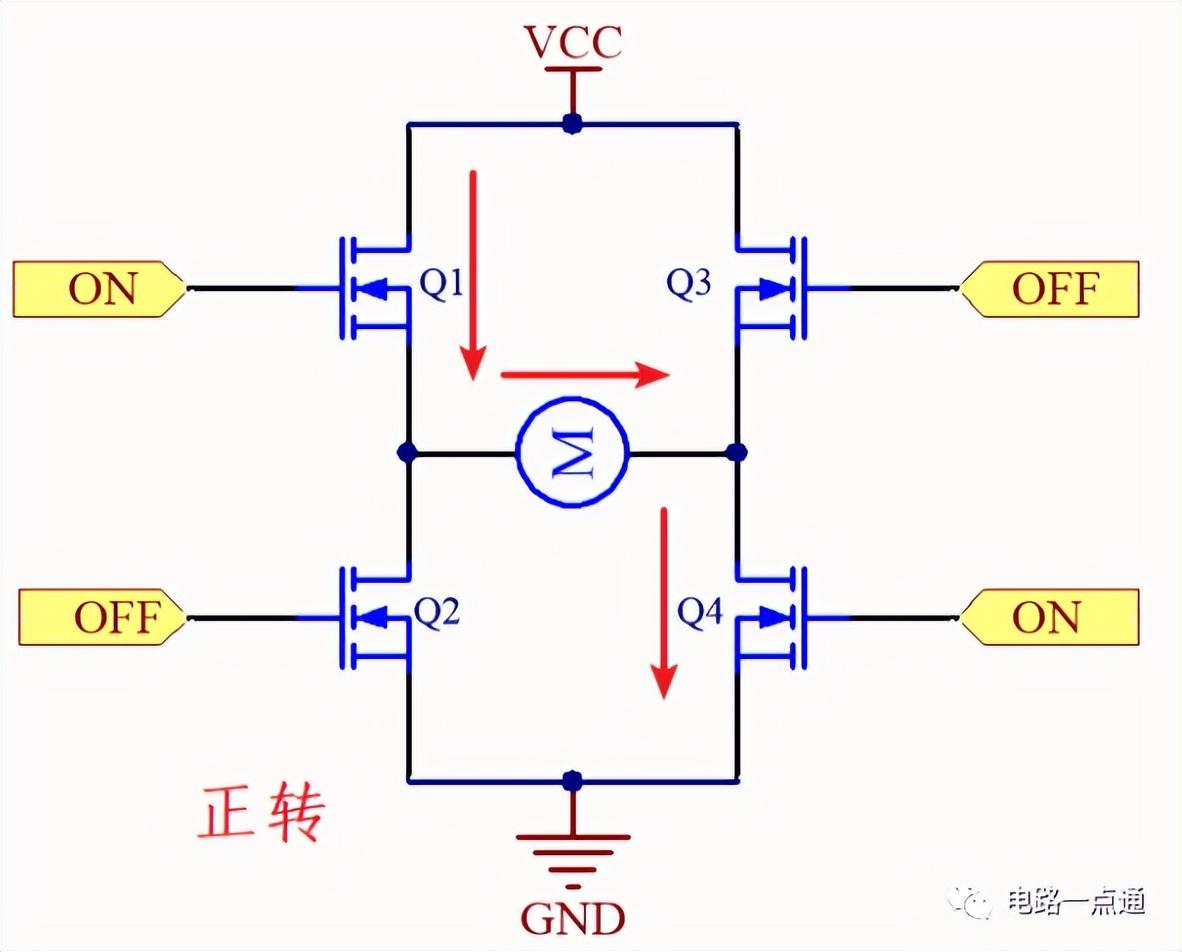
正转模式
当Q1、Q4的栅极为高电平,Q2、Q3为低电平时,Q1,Q4导通,如下图所示,电机正向旋转。
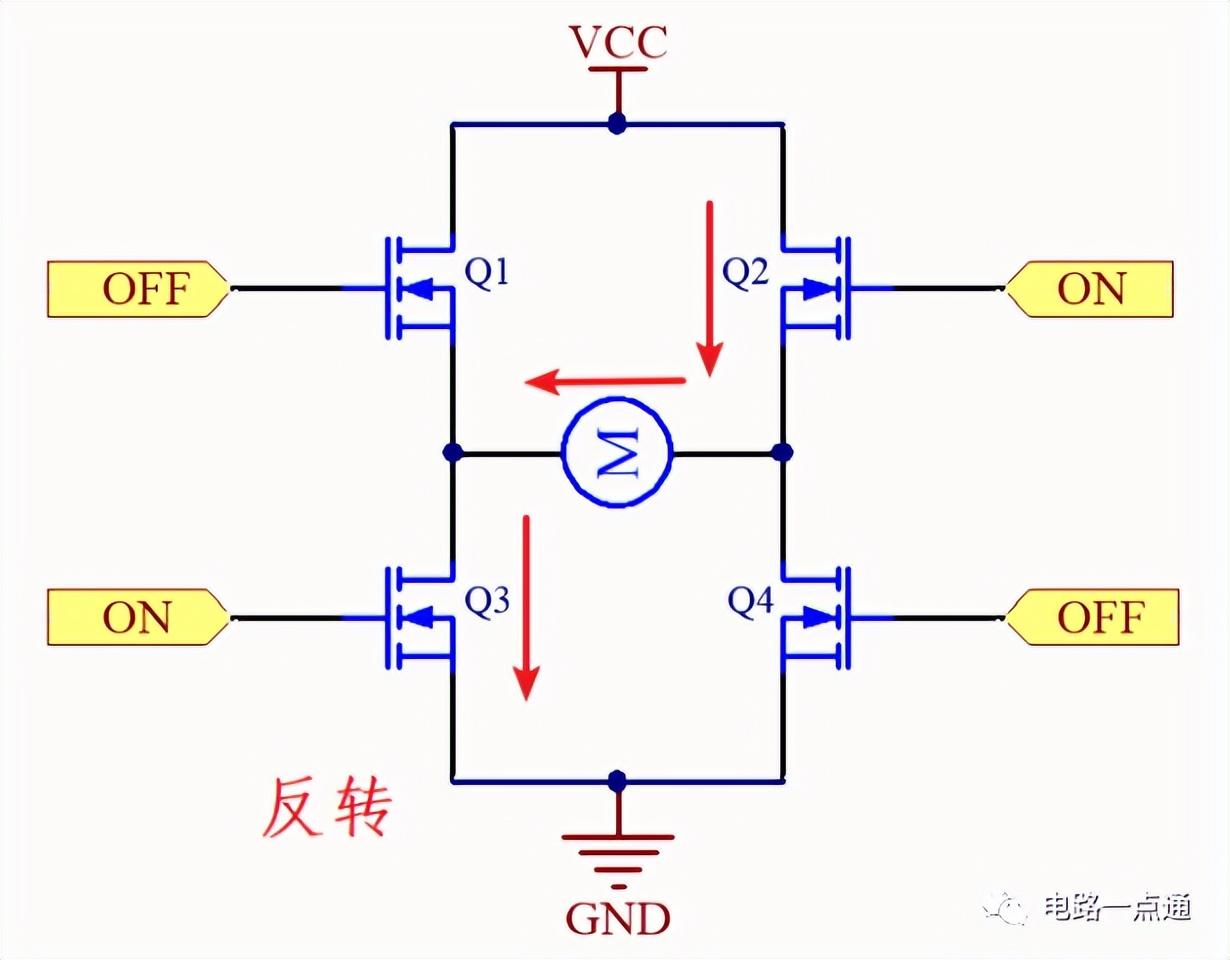
反转模式
当Q2、Q3的栅极为高电平,Q1、Q4为低电平时,Q2,Q3导通,如下图所示,电机反向旋转。
3.补充
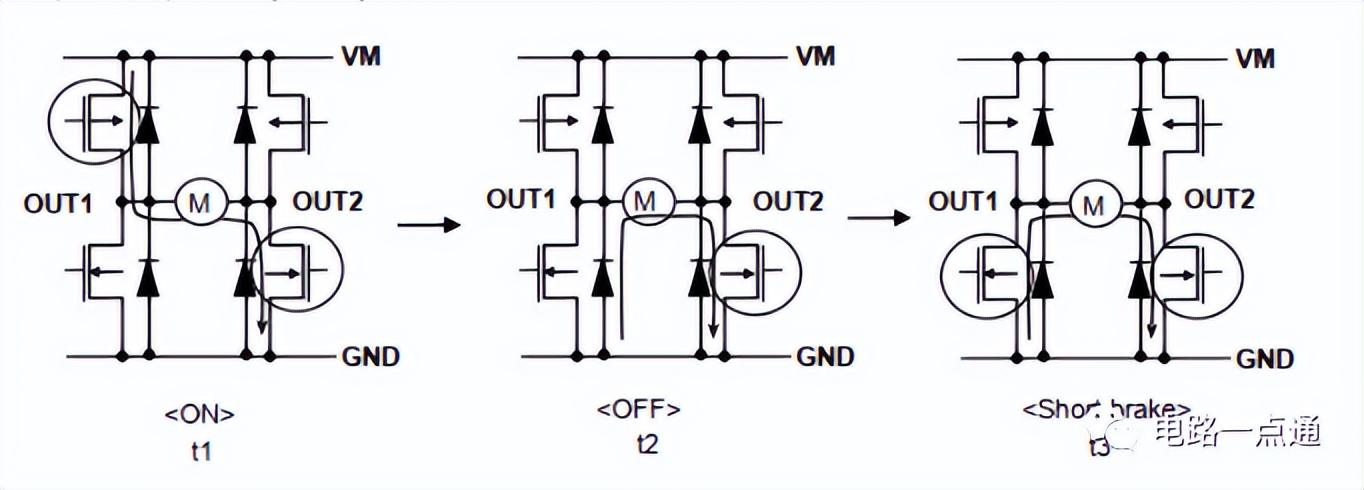
★ H桥中绝对不能出现同侧(左侧/右侧)的FET同时导通的情况,因为这样会导致电流不经过电机直接到地,(关注:硬件笔记本)形成短路!因此在状态切换时需要一步一步来,而集成H桥的芯片一般会在内部自动解决这个问题(利用死区控制),如下图所示:在正转和制动之间切换时,会有一个过渡状态(OFF)。
★ 此处还需补充一个知识:MOS管的高端与低端驱动。简单来说,高端驱动即MOS管在负载的高电位一端;相反低端驱动即MOS管在负载的低电位一端。如下图所示:Q1、Q3为高端驱动,Q2、Q4为低端驱动。在H桥中也常常被称为上臂和下臂。
★ 驱动电压越大,转速越快;电流越大,扭矩越大;
★ 当扭矩<负载时,电机转速会下降,电流上升从而增大扭矩。当负载非常大,电机带不动从而停止转动时(堵转),电流达到最大值,此时需特别注意,很有可能烧坏电机驱动。
二、什么是A4950
A4950是美国埃戈罗公司生产的一款单H桥电机驱动芯片。因此网上卖的模块多是使用两块芯片以达到可以控制两个直流电机的能力。
提供输入端子用于利用外部施加的PWM控制信号控制DC电机的速度和方向。提供内部同步整流控制电路以在PWM操作期间降低功耗。
★ 电机驱动电压:8~40V,输出最大电流可达3.5A
★ 推荐驱动频率:500Hz~30KHz
★ 内置过温保护,短路保护和可选择的过流保护
图 1 A4950实物图
图 2 A4950模块图
三、A4950引脚封装与功能框图
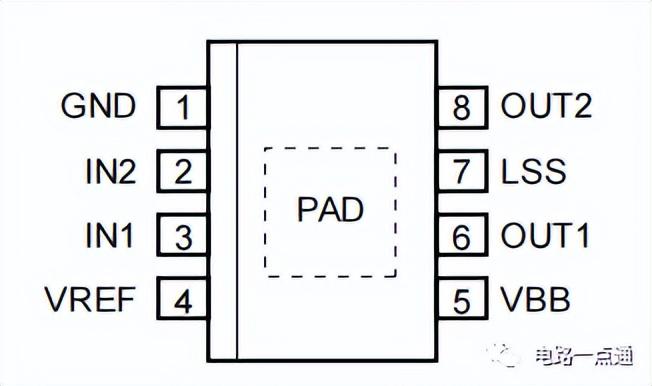
图 3 A4950引脚封装
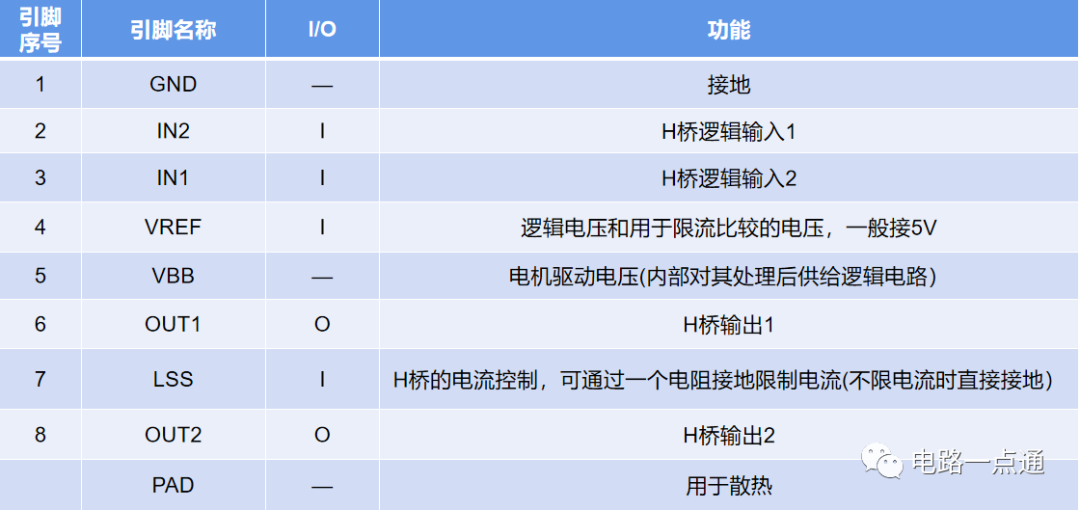
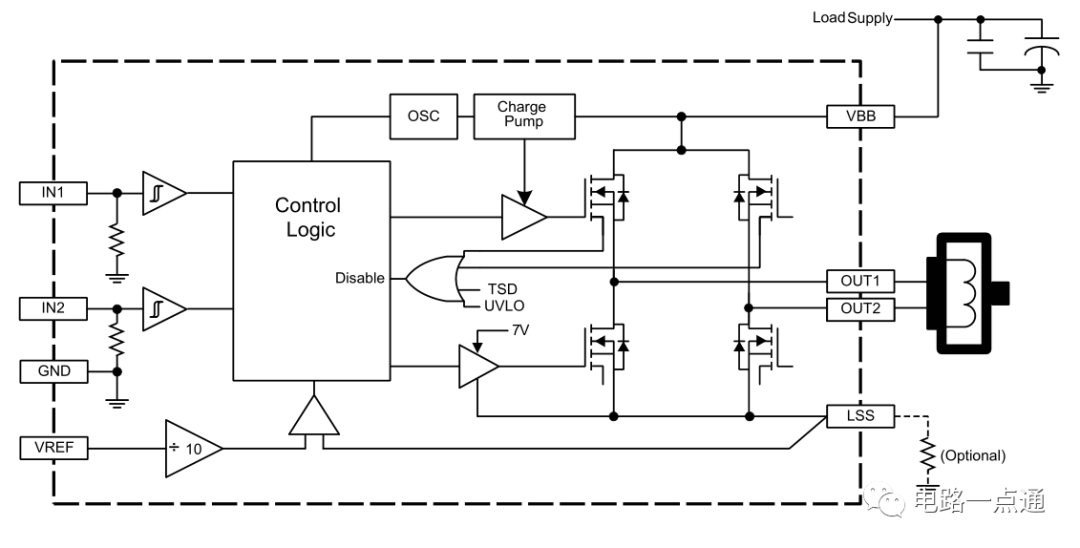
图 4 A4950功能框图
通过引脚说明和功能框图可看出,此芯片不同之处有:
★ 只有单H桥,因此引脚较少;
★ 限流比较的参考电压由外部给出(VREF脚);因此限流值Isense=Vref/10/Rsense。如上面的模块中,Vref接5V,Rsense为R250精密检测电阻(0.25Ω),因此限流值为2A。
★ 当IN1和IN2均保持低电平1ms,芯片进入待机模式。而不是通过引脚直接控制。
四、A4950驱动电路使用说明
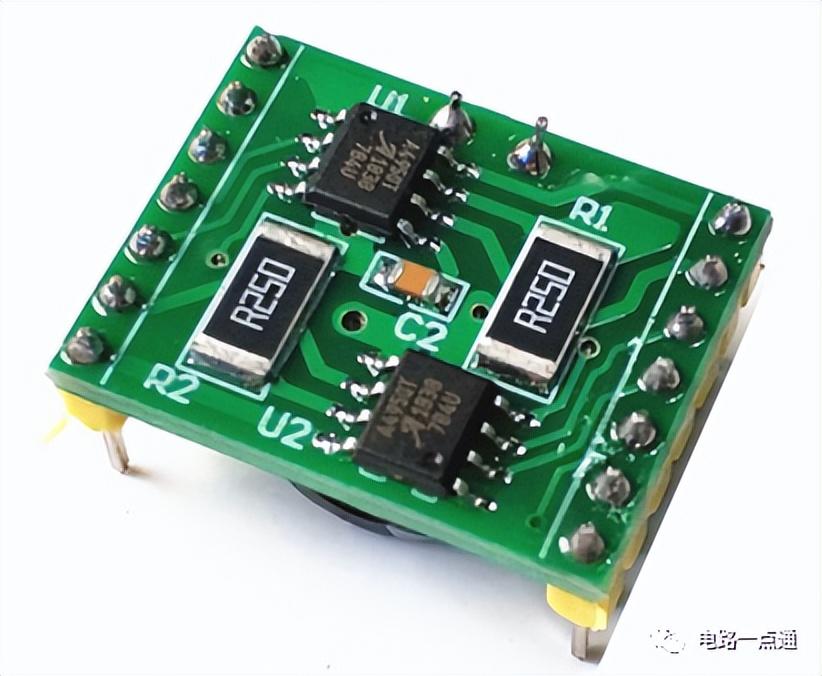
图 5 A4950驱动模块
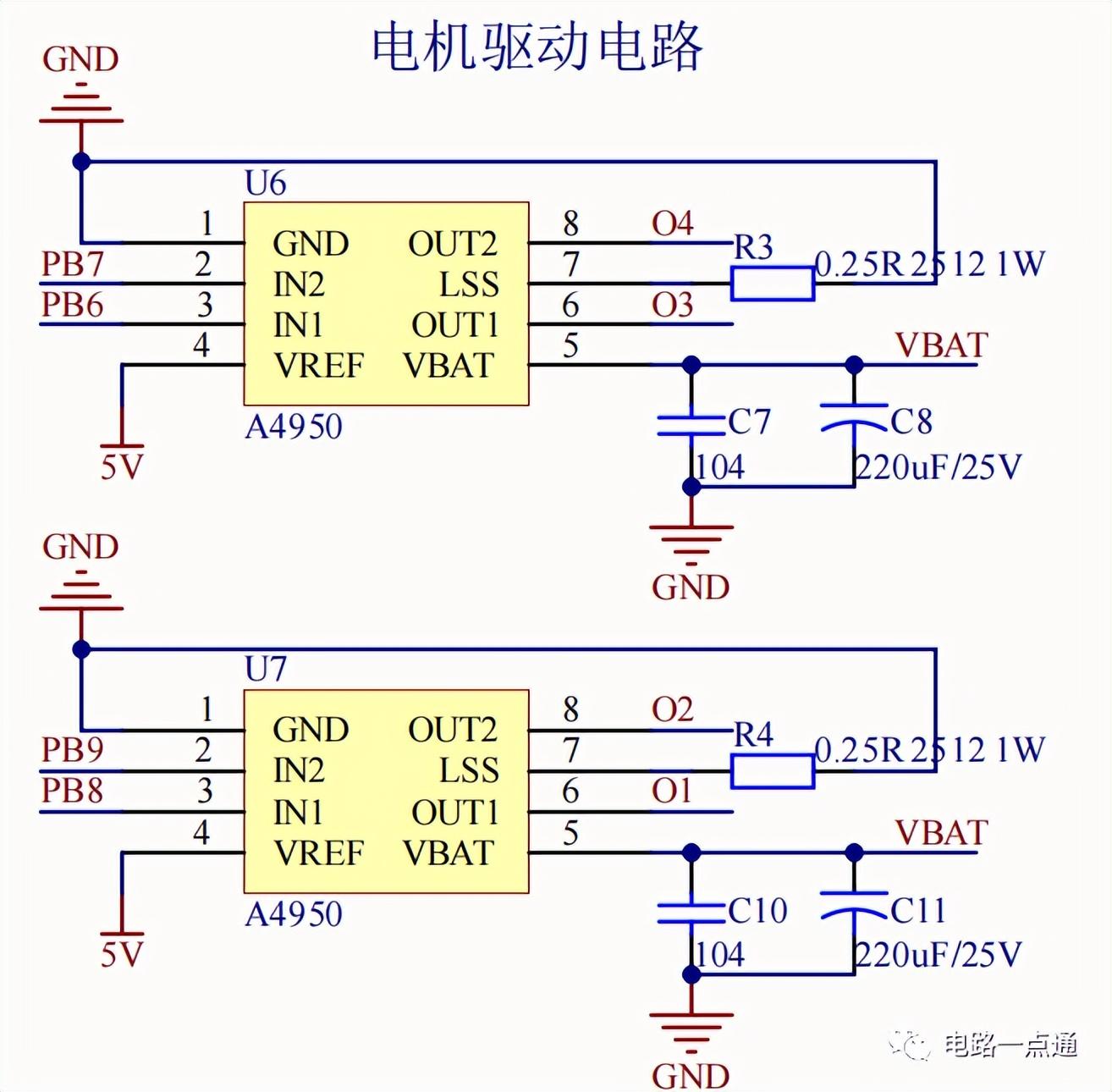
图 6 A4950驱动电路
驱动电路接口说明:
1.VM:驱动模块的电源,根据电机的参数输入,实测范围8~40V;
2.VCC:接5V输入,不能输入3.3V,不然会影响性能;
3.GND:接地引脚
控制示例(在以上的3个引脚都接好的情况下):
任务1:A电机正转,占空比50%
方案:电机A的2个线分别接AOUT1、AOUT2。AIN1接高电平,AIN2接50%的PWM
任务2:B电机反转,占空比20%
方案:电机B的2个线分别接BOUT1、BOUT2。BIN1接20%的PWM,BIN2接高电平
五、A4950逻辑控制
★ 下表为最基础逻辑控制表:
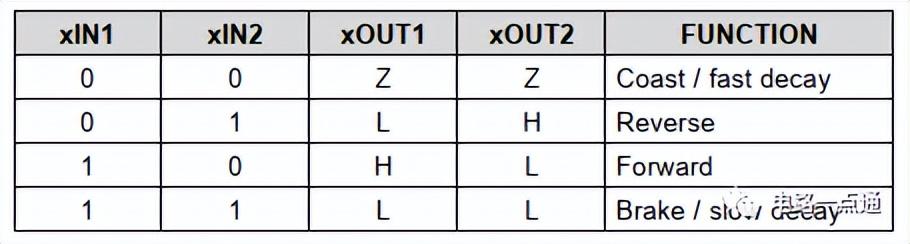
此表可对直流电机进行简单的驱动与制动(此时电机工作于全速状态,无速度控制)。
把xIN1和xIN2分别接到单片机I/O口,xOUT1和xOUT2接到直流电机两端。
当控制xIN1为1,xIN2为0时,电机便正转。
★ 再进一步便可借助PWM对电机转速进行控制,如下表所示:
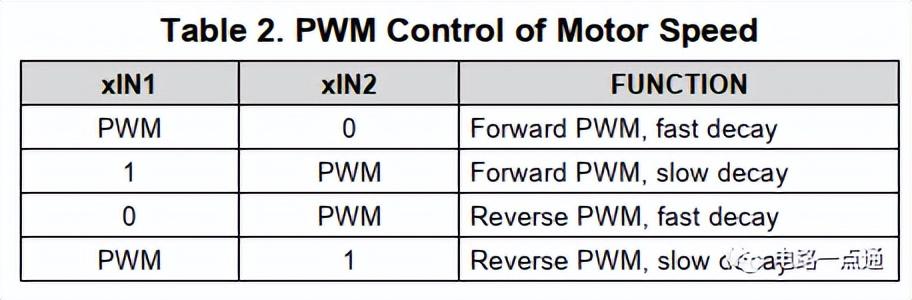
以xIN1为PWM,xIN2为0为例,电机在正向转动模式与快衰减模式之间不断切换。
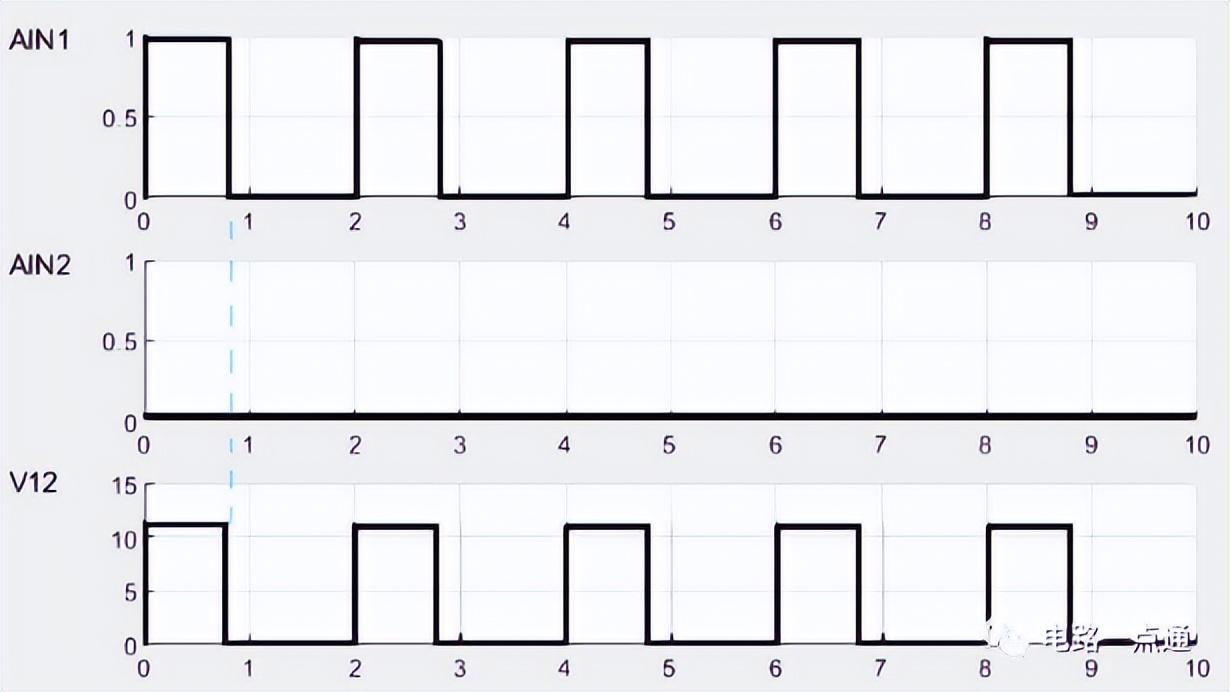
波形图类似如下:前面提到,电压的大小决定直流电机转速。从第三个图V12=Vout1-Vout2可看出,加在电机两端的电压变化随着PWM变化,则其平均值Vave=D*Vcc(D为PWM占空比,VCC为驱动电压)也随着占空比的增大而增大,从而速度也相应增加;反之则降低。
PWM的频率一般选在5k~20kHz。
把上表归纳总结一下:
1.当xIN中有一个恒为低电平,另一个为PWM时:采取正反转与滑动/快衰减,占空比越大,转速越快。
2.当xIN中有一个恒为高电平,另一个为PWM时:采取正反转与制动/慢衰减,占空比越小,转速越快。
六、总结
★1.可通过两个H桥输出的并联控制一个直流电机,这样最大驱动电流可翻倍,这在芯片的数据手册中均有说明;
★2.和A4950的体积小,外接元件少,使用简单;
★3.A4950虽然价格稍贵且需两块芯片才能实现双H桥;
★4.选择集成H桥芯片时,需要考虑的参数有:可承受的工作电流要大于电机的堵转电流,防止堵转时驱动芯片烧毁;导通电阻尽可能小,减少芯片的发热损耗;
★5.A4950所能驱动的电流最大也就3.5A。对于一些堵转电流十几安的电机来说是远远不够的。此时常常采取电桥驱动+MOS管的方式自行搭建H桥。









评论