
| ZMP上市面向嵌入与控制技术人员的实习用机器人 写于: 星期三 20 六月 @ 01:00:41 |
||||||||||||||||||||||||||||||
 “只模拟不动手的技术人员太多” ZMP上市面向嵌入与控制技术人员的实习用机器人 来自【日经科技】 从事个人机器人等开发的风险企业ZMP上市了面向嵌入软件技术人员和汽车控制技术人员的机器人教材。分别是可构成倒立振子和倒立二轮的车轮型的“e- nuvo WHEEL”,以及在1枚底板上配备电机和各种传感器等器件的入门版的“e-nuvo BASIC”。价格方面,前者13万4000日元、后者5万4600日元起价。
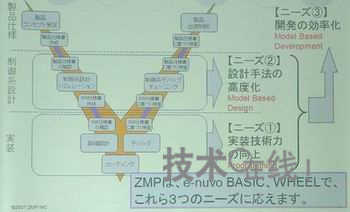
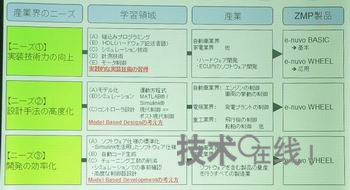
面向嵌入技术人员的机器人教材“e-nuvo WHEEL”(照片:上)、“e-nuvo BASIC”(照片:下)。 2006年7月该公司发表的技术人员教材构想,此次得到了实现。 此次教材的目的是:面向汽车行业和家电行业的嵌入技术人员,提高编程能力等封装技术水平、推动使用MATLAB/Simulink的模型开发等设计技术的发展、学习现代控制理论等等。
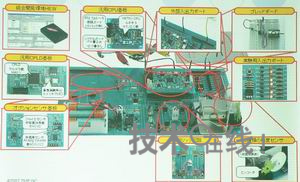
各机器人教材均准备有除了作为微控制器配备瑞萨科技的“H8及Tiny”外、还作为选项分别配备CPLD、Line Trace用的光学传感器和加速度传感器等器件的底板。该公司还准备有可一边使用教材实际动手操作、一边学习控制工程学、电子工程学、机械工程学等的详细教程,同时计划发行基于该教程的教课书。e-nuvo WHEEL由庆应义塾大学物理信息工学科教授足立修一、e-nuvo BASIC由芝浦工业大学电气工学科教授水川真协助进行教程的制作。 汽车行业出身的工程师开发的教材 此次的教材由ZMP负责技术人员培训教材和培训业务的该公司技术战略室主任坂井亮介以及川本智大开发。
坂井是曾经在早稻田大学从事双足步行机器人开发的、经验丰富的机器人控制专家,主管ZMP的教材业务。而川本则是原汽车行业的工程师,约一年半之前在某汽车配件厂商从事CVT(无级变速)的控制系统开发。 川本在前一个职位时,不仅负责控制系统的设计和开发,而且还参与检测、参数调试以及软件的封装等其它工序,对工序间技术人员的隔阂有很深的了解。“汽车行业中,如果是控制系统的话,就只负责MATLAB及Simulink这样的模拟器、不接触实际车辆,这样的技术人员很多。甚至有的技术人员只管输入参数进行模拟,而不考虑从控制对象的物理特性来看是不是可能。而机器人教材则可以提供实际操作的机会,而且可以体会现代控制理论等理论的有效性。 而且,负责软件封装的技术人员中,很多人对控制系统的设计并不关心。而通过此次教材的学习,可以加深技术人员对其它工序的理解。 另外据川本介绍,很多大企业已经推出了这些领域的研修课程,但基本上都上都是理论性的学习。“虽说机器人教材也不少,但不仅能模拟控制理论的有效性而且能使用机器人进行动作验证的教材却非常少。不仅大学和高专,就连汽车行业等企业界对此次教材的需求也很高”(川本)。 入门版包括嵌入相关的封装技术 各机器人教材分别设想的是如下学习领域。首先,入门版的e-nuvo BASIC的目的是学习嵌入软件的编程、基于HDL(硬件记述语言)的电路设计、使用MATLAB及Simulink的控制系统的模拟技术、计测技术、电机控制技术等实践性的封装技术。
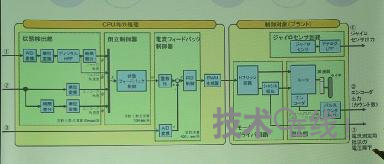
底板上,除了作为微控制器的外部输入及出端子而露在外面之外,还配备有电机驱动用的H桥电路、电机、电机旋转轴角度测量用的Potentiometer以教材使用者可自己组装的光学式编码器等等。 倒立振子等的建模控制 车轮型的e-nuvo WHEEL可进行基于运动方程式的控制对象的物理模型建立(建模)、利用物理模型的控制器的设计、现代控制理论及基于MATLAB及Simulink的模拟技术等等。(记者:进藤 智则)
|
共1条
1/1 1 跳转至页
ZMP上市面向嵌入与控制技术人员的实习用机器人
只看楼主 1楼









关键词: 上市 面向 嵌入 控制 技术 人员 习用 机器人
共1条
1/1 1 跳转至页
回复
| 有奖活动 | |
|---|---|
| 高温试验箱出现故障该怎么办? | |
| 5月直播——【探索边缘智能的未来——直播盛宴即将开启!】 | |
| 请大声喊出:我要开发板! | |
| 【有奖活动】EEPW网站征稿正在进行时,欢迎踊跃投稿啦 | |
| 【有奖活动】智能可穿戴设备AR/VR如何引领科技新潮流! | |
| 打赏帖 | |
|---|---|
| 换逻辑分析仪_STM32F103认识串口F103相关的知识认识被打赏18分 | |
| “DFRobot盖革计数器模块评测”了解电离辐射对人体的危害被打赏8分 | |
| “DFRobot盖革计数器模块评测”了解盖革计数器和电离辐射危害被打赏18分 | |
| 换逻辑分析仪_STM32F103_HAL库PWM呼吸灯被打赏23分 | |
| 换逻辑分析仪_STM32F103_(寄存器)PWM呼吸灯被打赏20分 | |
| 换逻辑分析仪STM32F103HAL库定时器被打赏13分 | |
| 换逻辑分析仪_STM32F103_(HAL库)驱动GPIO操作,点亮LED被打赏13分 | |
| 【分享评测,赢取加热台】+拆解一个儿童的python编程主控板被打赏20分 | |
| 【分享评测,赢取加热台】+拆解一个共享充电宝被打赏20分 | |
| 【换取手持数字示波器】+自制的STC无线调试器被打赏17分 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂