IARC第7代任务的机载计算解决方案

1.3 避障部分
本文引用地址://www.cghlg.com/article/269818.htm 避障部分主要由激光雷达组成,激光雷达测距系统包括一个单束窄带激光器和一个接收系统。这里选用日本北阳株式会社产的Hokuyo UTM-30LX激光雷达,如图5所示,此款雷达有270度的测量范围和30米的测试距离,总重270g,满足飞行器避障模块的要求。

2 软件结构
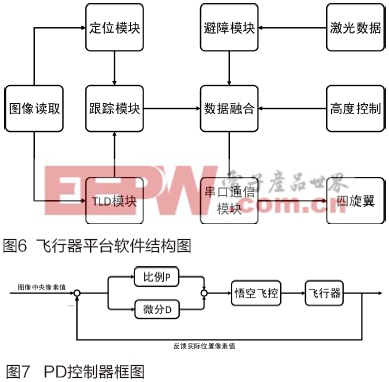
软件结构主要可以分为4个部分:定位、目标识别与跟踪、高度控制和避障。几个模块之间是互相独立又互相联系的,整个控制回路最后数据融合输出到飞行器硬件平台。在ROS框架下有很多开源的包可以利用,各个软件模块都在ROS下实现。软件整体结构如图6所示,下面分块介绍逐个模块的实现。
2.1 TLD算法
TLD(Tracking-Learning-Detecting)由英国萨利大学的Zdenek Kalal提出[5]。TLD是一种稳定、鲁棒、可靠的长时间跟踪算法。该算法研究的出发点是单独地运用现有跟踪算法或检测算法都无法长时间地跟踪目标。Kalal创造性地将跟踪算法和检测算法相结合来解决跟踪目标在被跟踪过程中发生的形变、部分遮挡等问题,同时,通过一种改进的在线学习机制不断更新跟踪模块的“显著特征点”和检测模块的目标模型及相关参数,从而使得跟踪效果更加理想。
在此系统中,为了保持好的追踪效果。根据地面机器人在图像中的位置,引入一个PD控制器,使飞行器保持在地面机器人上方。控制器的输入是摄像头画面中央的像素位置,反馈值是实际捕捉到的地面机器人在图像中的位置,控制框图如图7所示,根据实验调整PD参数而使地面机器人保持在图像的中央。图8显示了飞行器识别出的地面机器人,图9显示飞行器正在跟踪地面机器人。
2.2 高度控制算法
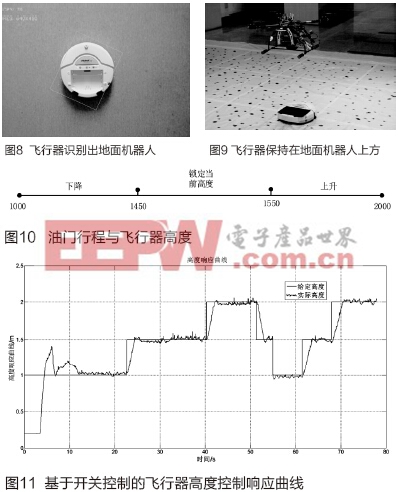
根据实际飞行器实验和悟空控制系统的说明[6],测试到油门信号与飞行器的实际升降有对应关系,具体如图10所示。油门PWM信号占空比分子在1000到2000之间变化,当在1450到1550之间时,悟空控制系统会使飞行器会自动锁定当前高度,根据这一特点设计了开关控制器,当高度低于给定值将占空比分子设置成1580,这样飞行器会缓缓上升。当高度高于给定值时设成1430,这样飞行器缓缓下降。并设置实际值在给定值上下5cm不作控制,即自动锁定当前高度。如图11,实验时给定值在0.5m—1m—1.5m切换时,飞行器能及时达到给定值。在打舵的时候,飞行器高度会有所改变,该控制器也能及时调整达到设定高度。图11中直线表示给定高度,绿线表示飞行器的实际高度,在时间10s附近开启高度控制器。
3 结束语
基于国际空中机器人大赛第7代任务,本文提出了一种机载设备的实现方法,并详细介绍了该方法的硬件平台和软件模块。此方法完成了定位、高度控制、障碍物规避和单一地面机器人识别与跟踪。飞行器续航能力有限且比赛时间有一定要求,所以要完成比赛a阶段的追赶目标,上层的策略模块还需要进一步完善。比赛的b阶段增加了飞行器的同台博弈,因此还需要更多的实验以增加系统的鲁棒性。
参考文献:
[1]OpenSLAM - Open Source Navigation Software Repository[EB/OL]. http://www.openslam.org
[2]S.Grzonka, G. Grisetti and W. Burgard A Fully Autonomous Indoor Quadrotor[J]. IEEE Transactions on Robotics 2012
[3]张建伟,张立伟,等.开源机器人操作系统ROS[M].科学出版社,2012
[4]R. Patrick Goebel. ROS By Example - Volume 1[M]. 2014
[5]Z. Kalal, K. Mikolajczyk and J. Matas Tracking-Learning-Detection[J]. Pattern Analysis and Machine Intelligence 2011
[6]大疆创新科技有限公司. Wookong-M快速入门手册v1.12 [EB/OL]. 2014
[7]C. McCarthy, N. Barnes Performance of Optical Flow Techniques for Indoor Navigation with a Mobile Robot[C]. International Conference on Robotics and Automation 2004
[8]W. Burgard,D. Fox, and S.Thrun The dynamic window approach to collision avoidance[J]. IEEE Robotics and Automation 1997

万能遥控器相关文章:万能遥控器代码
激光器相关文章:激光器原理





评论