两代Wi-Fi遥控小车DIY攻略

连接眼睛和大脑
本文引用地址://www.cghlg.com/article/247849.htm最后,重点来说一下Arduino控制板与网络摄像头的连接。网上有朋友用摄像头公司提供的插件做了一个运行在PC端的app,以此来控制继电器产生宽窄不一的脉冲。这里我没有采用这种方式,做app也不是谁都能完成的。本人采用的方式是直接用Arduino捕获摄像头内控制步进电机的信号,拆掉了摄像头中左右转的步进电机,用摄像头本身左右旋转的信号来控制小车的左右转,而用继电器的吸合来控制小车的前进与停止。

具体方法如下:
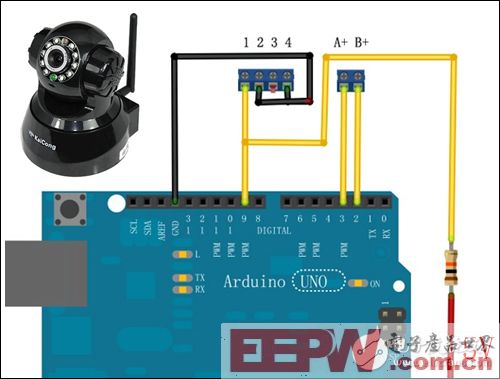
导线引出后,我们合上摄像头的底盖,来看看它背面的接口。如下图所示,在摄像头后面最中间的是天线接口,天线右侧的4个I/O口就是报警输出端口,4个I/O用1、2、3、4标识,其中1、2是报警输出端口,分别接到了继电器两端,3为报警输入端口(此端口未用),4为摄像头内容电路的数字地。
这3个I/O(不包括3号I/O)加上之前的A+和B+总共5条线,与Arduino的连接关系如下图所示。连接摄像头内报警继电器一端的2脚连到Arduino的GND,而连接继电器另一端的1脚连到Arduino的9脚,同时在9脚加上10k的上拉电阻,这样当继电器未吸合时,9脚因为上拉电阻,所以状态为高;而当继电器吸合时,9脚接GND,所以状态为低。网络摄像头报警接口的4脚也要连接到Arduino的GND,以使网络摄像头控制板与Arduino共地。A+与B+分别连接到Arduino的2、3脚,这两个脚如果连反了可以在程序中调整。
步进电机的控制方式是不断的变化A、B两相上的电压大小和电流方向,这样在A+和B+上就会产生一串脉冲。使用示波器观察我们发现,当发送左转的命令时,首先在A+上产生脉冲,而当发送右转的命令时,首先在B+上产生脉冲,效果如下图所示。
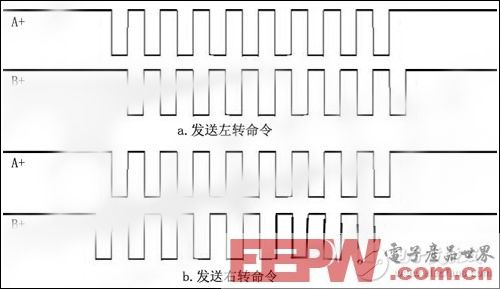
我们就利用A+、B+上的信号差异,以及继电器的吸合来实现对小车的控制。Arduino端用到了外部中断功能,2脚对应Arduino外部中断0,3脚对应Arduino外部中断1。
详细代码
/**********************************************




ps:可以在代码中添加一些Serial.println()的语句来查看一下程序在我们控制摄像头时能够做出正确的相应。代码调试完成后,如图下图所示,将Arduino控制板、电机驱动扩展板、稳压扩展板层叠的插在一起固定在小车的后面,前方安装好摄像头。

完成后的Wi-Fi小车上电工作正常后,如图下图所示。Wi-Fi小车的控制与摄像头的控制方式类似,打开电脑浏览器,在地址栏中输入网络摄像头的IP地址进入监控界面,就可以使用界面右侧的按钮来控制这部简易的Wi-Fi小车。另外,我选的这款摄像头还有一个厂家分配的唯一域名,只要在我们的路由器端简单配置就能够实现广域网条件下的小车控制了。

OK,大功告成!







评论