蓄电池电机车调速系统分析及其改造设计

3 电机车回馈制动的控制
电动机等效电路如图2所示。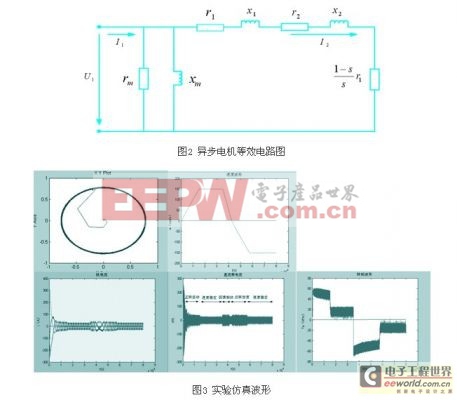
假设电机所带负载的机械能基本上被电机内部所消耗,于是有
当电机负转差率位于范围时,系统的机械能经电机转化为电能向蓄电池回馈。同时电机不出现过流,也就是反馈的电能不能被电池吸收的部分,可以由电机本身承受消耗而不出现过流当转差率变化超过该范围时,机械能经电机转化的电能无法有效回馈给电池,而剩余部分的能量在电机的线圈内阻中又无法完全消耗,因此容易出现过流。所以,从简化控制的角度出发,当控制转差率在s1≥s≥s2范围内变化时,再生制动过程就可以避免出现过流。
本文提出的再生制动方法在直接转矩控制(dtc)中。首先观测定子磁链,控制定子磁链的幅值为恒定然后选择零矢量、非零矢量来调节瞬时转差,控制输出转矩恒定,所以,由磁链环节观测定子磁链的幅值及相位,并且选择矢量控制磁链幅值大小;转矩控制环节(与磁链控制环节相结合)选择矢量控制磁链的旋转速度。系统采用了直接转矩控制方式,其磁链控制环节可以有效的控制磁链的偏差,在这种情况下可以保证输出的电流谐波少,运行平稳。而在直接转矩控制的基础上实现的再生制动控制,就是使定子频率跟踪转子速度变化,只要能保证转差率的变化范围,就可以实现系统在制动过程中不出现过流。而且制动效果的强弱可以通过调节转差率和定子磁链负值来实现。
4 仿真结果
对以上建立的新型直接转矩控制异步电动机变频调速系统进行仿真实验。三相逆变器开关器件采用igbt,反并联反馈二极管,igbt的缓冲电阻rs=10kω,缓冲电容cs=10-3μf。仿真实验所采用的异步电动机参数为:额定功率pn=12kw,额定频率fn=50hz,ψn=0.95wb,rs=0.16891ω,rr=0.13973ω,ls=0.02877h,lm=0.02777h,lr=0.0289h,np=2,j=0.1349kg.m2。控制系统参数:ψ*s=0.95wb,速度给定为150rad/s,负载转矩给定tm=15n.m,转矩限幅值为80n.m,pi调节器的比例系数kp=50,积分系数ki=130,直流侧电压udc=600v。
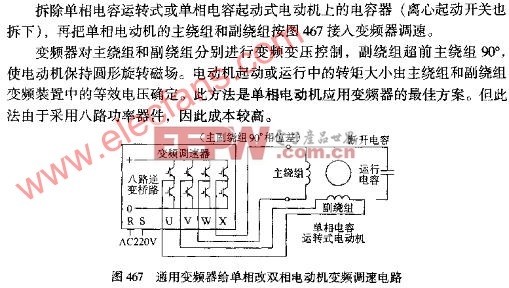
首先速度给定设为150rad/s,等到系统稳定以后,再将速度给定设为-150rad/s,观察其磁链,速度,转矩,线电流,直流侧电流波形。
从图3波形可以看出,异步电动机处于加速减速反转等运行状态,从正向加速到回馈制动,最后到反向加速至稳定状态,实现异步电动机的四象限特性。
5 结束语
我国矿用蓄电池电机车多数采用的是直流电动机串电阻调速,若是课题的成功得以顺利的应用于煤矿实际中,无论是电机车的调速性能,牵引能力,承载量和维修量等方面都有全面的提升,另外,从经济效益出发,蓄电池电机车利用制动对蓄电池进行充电,节约了大量的电能,延长蓄电池电机车的工作时间,减少了蓄电池年平均充电数,延长了蓄电池的使用寿命,大大提高了经济效益。
三相异步电动机相关文章:三相异步电动机原理 调速器相关文章:调速器原理 汽车防盗机相关文章:汽车防盗机原理



评论