单芯片无刷直流散热微电机驱动电路综述


2.1.2 三相无定位传感器驱动控制芯片
由于定位传感器型驱动芯片存在缺点,故此处采用无定位传感器驱动芯片。当前无定位传感器驱动芯片多采用三相驱动方式,通过检测不通电那一相线圈绕组反向电动势过零计算出电机驱动电流换相时机。在LV8800,BH67172及DRV10863中都采用了上述控制方式。
图3为上述控制方法工作原理。假设u,v两相导通,w相绕组线圈浮空且无电流。导通u,v两相反向电动势大小相等方向相反,二者之和等于零。而浮空相绕组线圈反向电动势ew正负变化反映了浮空相过零,因此可采用上述方法检测电机转子位置,从而确定电机换相时机。
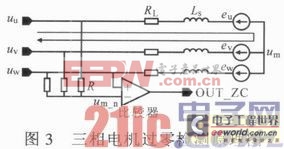
由于三相无定位传感器型驱动芯片采用开关模式而非线性放大,同时无位置传感器,因此其软开关实现方式与定位传感器型驱动芯片不同:其根据反向电动势过零信息通过数字电路计算出软开关换相区域,且采用PWM模式进行控制:当电机转子临近反向电动势过零点时,提前减小将退出驱动相的输出占空比;当电机转子离开过零点后,逐渐增加开始驱动相的驱动占空比。采用上述模式换相控制后,退出驱动相电流逐渐减少,进入驱动相则逐渐增加。因此换相点附近电机换相力矩平稳,能实现电机低噪声运转。
2.2 电源电压12 V驱动电路控制方案
该类方案主要用于个人电脑及各种测试设备,驱动功率适中,因此功率驱动管多采用内部集成方式实现。由于电源电压从4.5~18 V变化,若仍采用低压应用时的线性放大模式,那么在传感器信号幅度较低时,换相产生的热量大,极易损坏驱动系统,因此多采用开关型桥式驱动。代表解决方案有LB11961及EUM6861。该类方案的最大特点是电机转速曲线外部可调:能自由设定电机最低转速,同时还能灵活设定电机转速曲线斜率。电机转速曲线控制示意图如图4所示。
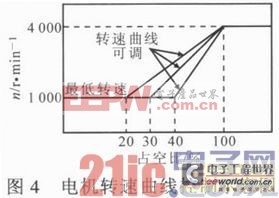
图5详细分析了调速原理:当VTH和RMI任一引脚电压低于CPWM引脚产生的三角波电压时,输出信号为高电平,此时集成的功率管驱动电机转动。RMI引脚设定电机最低转速,该引脚直流电压与CPWM引脚三角波信号比较确保输出有最小驱动占空比,从而保证电机最低转速。VTH引脚的直流电压、CPWM三角波及RMI电压共同控制电机转速曲线斜率。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理





评论