PSoC微处理器在电动车无刷电机控制器上的应用

4. 通用I/O
PSoC微控制器的通用I/O数量从*4位不等,具体根据不同型号来确定。每个I/O功能可编程选择。在输出模式中可选择输出驱动方式,模拟输出驱动可达40mA。通过内部上拉或者下拉电阻输出,强输出,可设置输出最大的驱动电流达25mA。所有引脚都能作为中断电源,通过引脚信号变化产生中断。并可选择位上升沿触发终端、下降沿触发。引脚能与模拟模块相连。此外,还有用作斯密特触发器的TTL、I/O。
5. 振荡器
PSoC系列器件有多种振荡器可供选择,总能为CPU时钟、模拟PSoC模块和数字PSoC模块的时钟,找到合适的振荡器。主要有内部达到24/48MHz的主振荡器、一个32.768MHz外部晶体振荡器和内部低速振荡器。主振荡器误差为±2.5%,且没有外部补偿,外部晶体振荡器可对PLL选定精度,内部低速振荡器一般作为PSoC模块和看门狗/睡眠定时器的时钟。可使用时钟分频器,从而优化代码执行速度和减少功耗。
6. 专用外设
PSoC系列器件还提供一些专用外设,包括看门狗/睡眠模式时钟(Watchdog/Sleep Timer)、可设定电压阀值的电源低电压检测(LVD/POR)、中断控制器、采样抽取器(Decimator)、片内温度传感器和片内电压参考等。
7. 静态COMS器件
PSoC微处理器系列运用了先进Flash工艺的全静态CMOS器件,实现高度低电压功能。通常电压保持在3.0到5.5V DC,使用片内开关式电压汞可使工作电压降低到1.0V DC,工作于-40℃~+85℃。
电动车无刷控制器系统
由CY8C24423构成的电动车无刷控制器系统原理框图如图2所示。
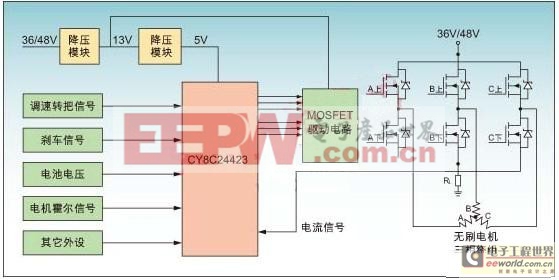
图2:电动车无刷控制器系统原理框图。
要让图中所示的电机转动起来,首先控制部就必须根据电机霍尔感应到的电机转子目前所在位置,然后决定开启(或关闭)MOSFET的顺序,如上图中之A上、B上、C上(这些称为上桥功率晶体管)及A下、B下、C下(这些称为下桥功率晶体管),使电流依序流经电机绕组线圈产生顺向(或逆向)旋转磁场,并与转子的磁铁相互作用,如此就能使电机顺时/逆时转动。当电机转子转动到霍尔传感器感应出另一组信号的位置时,控制器又再开启下一组MOSFET,如此循环电机就可以按同一方向继续转动,直到控制器决定要电机转子停止,此时则关闭MOSFET,要电机转子反向则MOSFET开启顺序相反。
一个最基本的电动车用无刷电机控制器所需要实现的功能包括除了转把调速外,还应该包括欠压保护,过流保护,刹车断电等。另外近年来还有一些实用且流行的功能如定速巡航、ABS刹车再生制动、1:1助力等等。从上面的原理框图可以很清楚地看出,整个系统只用了一个PSoC芯片便实现了上述的所有控制功能。图3为本文设计的无刷控制器半成品实物图。

图3:电动车无刷电机控制器半成品实物外形图。






评论