变频器内置PID功能及应用

4 恒压供水电气原理及相关参数的设置
4.1 恒压供水电气原理图
图3 所示是典型的恒压供水电气原理图,供工程人员设计施工时参考。图中变频器选用KV2000无感矢量变频器,功率从0.75 ~650 kW可选;PS是压力变送器,所选型号是PT124B-1/4NPT,输入范围0~1.6MPa,输出范围4~20 mA,工作电压为DC24 V。
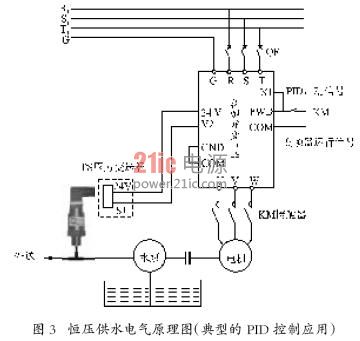
系统采用以变频器内部参数F027 设定希望保持恒定的压力值,恒压设定值是0.4 MPa。以压力传感器测定最终的供水压力,并反馈给变频器PID 控制系统监控,确保恒压供水。选用的压力传感器的测定范围最大是1.6 MPa,在此压力下传感器回馈的电压值是20 mA,并且将压力传感器信号从V2 模拟端口输入。系统以PID功能控制水泵的运行,保证水管内的恒定压力值。
4.2 变频器参数设置
1)F073=0.2 表示PID 的设定值选择从F027直接设定,反馈值选择从V2模拟输入端口输入。
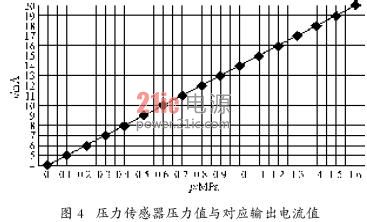
2)F027=25.0(25%) F027的设定值与压力传感器的量程和系统要求有关系,系统要求压力为0.4 MPa,如图4 所示,8 mA对应0.4 MPa,为1.6 MPa的25%,所以设定F027=25.0,代表设定值是最大值的25%,而系统最终通过PID控制水泵的运行,将反馈信号修正到25%的位置,也就是压力传感器会感应到0.4 MPa。
3)F016 下限频率30.00 设定水泵的最低运转频率为30 Hz。一般此频率的设定参考水泵在各频率段的有效输出压力值(或者扭力的输出值),以及整个供水系统的设计方式(包括止水阀的选择、水泵电机的散热和效率等因素)。
4)F015 上限频率50.00 设定水泵最高运转频率为50 Hz。此为一般条件的设定,若有特殊要求,则另外设定合乎要求的值。
5)F001,F002 加、减速时间依现场要求设定,设定的时间愈长则系统反应愈慢,设定愈短则对于电机的额定要求愈高。
6)F039启动/ 停止方式设定依照现场运行的要求设定,在图3 的电气原理中,F039设定为2.0,即外部端子控制运行方式。
7)F040=40 输出频率由PID输出决定。
8)F041=50 选择X1 功能为PID启动功能。选择X1数字输入端口作为PID启动的输入,若没有特殊要求,最简单的方式就是将X1直接与变频器的运转信号并联,与变频器的运转同时启动。
9)F055=4 模拟转换器输入信号选择V2 的测量值。F055选择需要检测的信号通道,当选择4时,检测的是电流通道,即检测压力变送器的输出信号。变频器中央处理器的10 位A/D 转换器将该模拟信号转换成数字信号,并将转换的资料存放在F056之中,被转换的资料范围在0~1 023之间。
10)调整F091 V2端子输入最低值。
11)F092 V2端子输入最高值的设定值。
设定参数F091和F092,首先将变频器输出到电机的电力线断开,不让电机运转,以确保安全。F091、F092的调整是为了设定V2 端口与压力变送器的输入范围,因为V2 是用于接收压力传感器的反馈信号,F091、F092 的值主要是用来配合压力传感器的反馈信号范围(4~20 mA)。F091设定为220[当给V2端子输入4 mA 时,变频器接收的信号为220(即4 mA/20 mA×1 024=204)],F092设定为1020。
4.3 调节PID参数
PID参数整定是控制系统设计的核心内容,一般根据被控过程的特性来确定PID 控制器的比例系数、积分时间和微分时间的大小。PID参数整定的方法很多,概括起来有两大类:一是理论计算整定法,它主要是依据系统的数学模型,经过理论计算确定控制参数,这种方法所得到的计算数据不可以直接用,还必须通过工程实际进行调整和修改;二是工程整定法,它主要依赖工程经验,直接在控制系统的试验中进行,方法简单、易于掌握,在工程实际中被广泛采用。
此恒压供水电气系统按工程经验值设定F075=300、F076=300、F077=200即可满足系统要求,或按如下步骤进行设置。
1)设F001=0.1、F002=0.1、F075=0.1、F076=0.1、F077=0.1。
2)当压力为0 MPa时,即V2 的输入为4 mA,让PID启动,观察变频器输出的频率显示,调整F075让输出能超过F016设定的值即可。此时调整好的值就是P增益必须设定的最小值,若小于此值那么系统的反应就太慢了。注意,每次重新设定F075 的值后,应将变频器重新复归后再启动PID,这样观察到的输出频率会比较准确。在做以下的步骤时,也应掌握这项原则,避免观察的现象受以前的PID 参数影响造成误判。
3)将V2的输入保持为4 mA,把F027 的值降在原来的10%以内(原为25,现设为2.5),再将F016设为0。这时启动PID并观察输出的频率,然后再调整F076的值,直到频率增加的速度达到满意为止(增加到50 Hz)。切记,够了就好,别让I增益太大,保留裕量在实际运转时再调整。
4)暂时不调整F077,保持设定值0.1。
5)恢复V2以及F027的设置。
如果想要修正更快速,可以增加P和I 的值(彼此依照比例同步增加),再重新复归后,就能见到变更的效果(或是等待比较久的时间也可以)。当增加P 和I 的值后,若发生振荡或过度修正,则增加D 增益来改善。检查反馈信号的值和实际状况是否相同,若一切正常,那么KV2000的PID即可正常工作。
4.4 PID的动作的检查
其他类型变频器的内置PID,用户完全要看压力的大小以及变频器设置的数值,才能判断变频器的频率什么时候上升或下降,工作是否正确。而KV2000无感矢量变频器使用起来非常方便。上面介绍到F055=4 的时候,模拟转换器输入信号选择V2的测量值。转换的资料范围在0~1 023 之间,被存放在F056 之中。也就是说,从F056 参数中,就可以了解到压力的大小。而设定值的计算为
( F092-F091 )×F027+F091 (1)
式(1)中的F091 为V2端子输入最低值,F092为V2端子输入最高值,F027是系统目标值,所以有(1020-220)× 0.25+220=420,这个420 就是要与我们F056读到的数值大小进行比较的参考值。当F056读取的值大于420时,变频器输出频率下降,表示检测到的实际供水压力大于目标值;当F056读取的值小于420时,变频器输出频率上升,表示供水压力低于目标值。
5 结语
最后提醒,PID仅是整个系统控制环节里的一个单元,PID响应时间的快慢,还要考虑到系统中其他单元对系统的响应速度的影响,这些因素包括:
1)变频器的加、减速度时间(若PID 的输出结果是用作变频器的速度指令);
2)电机对速度变化的反应(电机的时间响应特性,电机的扭力、功率是否足够大);
3)回馈装置的系统反应时间(当系统在修正时,反馈信号是否及时反应,系统整体是属于快速反应还是慢速反应)。因此,当系统的反应速度不能令人满意时,要注意不要一味地调整PID增益,有时可能是其他因素造成的结果,所以必须要找出原因,才能彻底解决问题。















评论