车用LED照明技术及现状分析

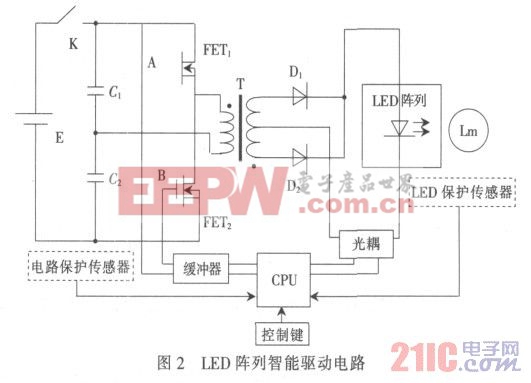
目前车用LED 驱动器一般采用两种方法控制正向电流。(1) 采用LED 的V-I 曲线确定产生预期正向电流所需要向LED 施加的电压。其缺点为:LED 正向电压的任何变化都会导致LED 电流的变化, 其中的镇流电阻的压降和功耗会浪费功率和降低电池使用寿命。(2) 利用恒流源来驱动LED。因为此方法需要将LED 并联在电路中, 而驱动并联LED 需要在每个LED 串中放置一个镇流电阻, 这会导致效率降低和电流失配。因此, 这两种方法都不能充分体现LED 应有的优越性。为了克服现有车用LED 驱动器的缺点, 出现了车用LED 阵列的高效智能驱动方法。该方法采用了半桥式DC-DC 变换技术、全波整流技术、光电耦合技术等, 确保了整个驱动电路的工作效率; 提出了基于嵌入式系统的智能控制方案, 此方案采用智能PWM 稳流控制和调光控制, 具有负载开路/短路保护和过流过压保护功能。图2 为LED阵列智能驱动实验电路。 如图2 所示,CPU 输出两路完全倒相对称的PWM信号A、B, 分别作用在开关器件上, 使其轮流导通; 通过高频变压器T 将能量耦合到次级, 再经快恢复二极管D1、D2 进行全波整流, 以实现对LED 阵列的驱动。LED阵列驱动回路的光电耦合器, 完成对LED 阵列驱动电流的监测, 并反馈到CPU, 形成一种智能电流负反馈的闭环控制系统, 以确保驱动电流的稳定的可靠性。 车用LED 驱动电路的集成化和智能化程度越来越高。类似PMU( 电源管理单元)的芯片及封装的小型化将逐渐取代多个单一功能电路进行组合的方法, 以适应板级空间非常有限的车载应用。同时, 由于单片机、DSP 等控制芯片以及嵌入式技术的不断发展, 可通过软件技术实现车用照明系统的自动化, 这样LED 的恒流驱动精度以及亮度的自动调节会更加准确。智能化控制已经成为新一代车用LED 驱动器的设计理念。 3 汽车LED 前照灯 由于汽车前照灯在行车安全中具有重要的作用, 因此LED 前照灯是最难也是最后投入使用的。以前,LED前照灯只应用在概念车上, 随着LED 照明技术以及汽车产业的不断发展,LED 前照灯的应用范围已从概念车、豪华车向中档车甚至一般车型过渡, 并且照明发光强度已达到白炽灯的水平。 汽车前照灯包括远光灯和近光灯。在夜间行驶时,远光灯应保证照亮车前100 m、高2 m 处范围内的物体, 且亮度均匀; 近光灯不但要保证车前40 m 司机能看清障碍物, 而且不能让迎面而来的驾驶员或行人产生眩光, 以确保汽车在夜间交会车行驶时的安全。 传统汽车前照灯输出近光和远光两种功能的光束,且每种光束分布模式均呈静态分布, 具体的光照分布也都符合国家标准。但在实际应用中, 此系统射出的光束分布于有限的角度范围, 在一些较为复杂的路况下( 如转弯) 极易产生视觉盲区。另外, 传统汽车前照明系统不具备自动调整光束分布的功能, 近光光束和远光光束之间的变换需驾驶员手动操作实现, 这样在来往车辆频繁的行车环境下, 车辆之间容易产生眩目光。为了克服传统汽车前照灯的上述缺点, 自适应前照系统AFS 应运而生。 AFS 是一种能使驾驶员更好地适应各种速度、道路类型和天气条件的变化, 提高驾驶安全性的前照灯系统。其工作原理如下: 当汽车进入特殊的道路状况(如弯道) 时, 由于方向盘和速度发生变化, 角度传感器和速度传感器传输到电控单元(ECU) 的信号就相应发生了变化。ECU 捕捉到这些信号变化, 同时判断车辆进入了哪种弯道, 并发出相应的指令给前照灯的控制单元, 控制单元根据收到的指令操控装在AFS 灯体内部的微电机带动发光三要素绕相应的旋转轴旋转, 从而在非常规路面及天气下行驶时, 改变照明方式, 提供更好的安全保障。 随着白光LED 技术的发展及空气动力学和汽车造型的需求, 汽车前部位置越来越低且呈流线型, 为前照灯预留的空间越来越小。为了满足汽车照明智能化和人性化的需求,AFS 与LED 灯的结合已经成为现代汽车前照灯的发展趋势。









评论