车身控制模块设计要求及解决方案

车身网络要求及发展趋势
可以应用于汽车中的系统总线有多种,如控制器区域网络(CAN)、本地互连网络(LIN)及FelxRay等。这些总线的特点各不相同,表1比较了汽车应用中几种常见的系统总线,并列出了典型的安森美半导体总线收发器产品。
表1:不同汽车总线比较及典型收发器。
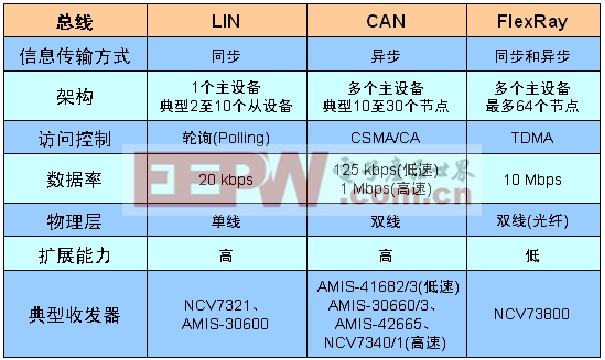
安森美半导体的总线收发器系列非常适合车身控制网络应用要求。图3a)及b)分别显示了基于安森美半导体CAN收发器AMIS-42665及LIN收发器NCV7321的典型电路。值得一提的是,AMIS-42665提供小于的10μA的极低静态电流。支持总线唤醒,共模电压范围-35V至+35V,可以承受额定+/-8kV的静电放电(ESD)脉冲。NCV7321则支持-45V至+45V的电压范围,承受额定5kV的ESD脉冲。这些器件均提供强大的保护功能。
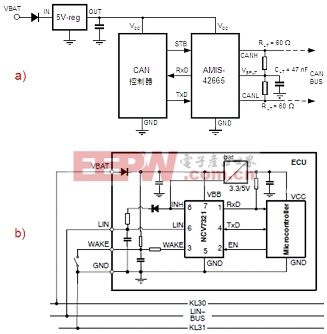
图3:基于安森美半导体收发器的典型CAN电路(图a)及LIN电路(图b)。
在车身控制网络应用中,需要尽可能地配合降低成本及空间要求,同时提升系统的稳定性和长期可靠性,故需要提升元器件的集成度。得益于近年来出现的混合信号工艺,如安森美半导体的SmartPower高压BCD工艺,高压模拟电路如今能够与低压电路集成起来,使更高集成度的系统芯片得以开发和应用。如安森美半导体的NCV7440在同一颗芯片上集成了线性稳压器及CAN收发器,NCV7420则集成了线性稳压器及LIN收发器。这样的集成有效节省PCB板空间,可以给MCU单独供电,有效遏制其它模块对MCU电源的干扰。
安森美半导体身为全球领先的高性能、高可靠性硅解决方案供应商,更为汽车车身控制网络应用推出一款超高集成度的芯片――NCV7462。这款芯片集成了线性稳压器、CAN收发器、LIN收发器、看门狗(WD)电路、低边驱动及高边驱动,将所需外部元件数量减至极少,仅占用极小的电路板空间,并帮助简化设计流程。
遥控上锁及开锁设计要求及解决方案
汽车中的遥控上锁及开锁的应用越来越普及。车身控制模块使用315MHz(美国、日本)或433MHz(欧洲)频率,通过高频接收和发送来实现遥控上锁及开锁功能。这类应用中的设计难点在于设计阻抗匹配电路,从而使功率损耗降至最低。此类应用的通用要求包括低静态电流、提供睡眠模式、低发射功率、高接收灵敏度、低功耗及适宜的频率范围等。而安森美半导体的ON-53480高频收发器很好地满足这些设计要求,如静态电流低至小于1µA,带有唤醒及睡眠检测功能,信号电平仅为10dBm,接收灵敏度更是低于-100dBm,且工作电流仅为10mA,频率范围为280至343MHz。
板外大功率负载驱动及方案比较
车身控制模块电路板需要为板外的一些大功率负载供电,这些负载包括汽车内部照明(5W及10W)、单向电机和汽车喇叭等。一种可选的方案是采用板内继电器。继电器的线圈属于感性负载,而感性负载在启动时需要比维持正常工作所需电流大的启动电流,且感性负载在接通电源或断开电源的瞬间会产生反向电动势。要驱动继电器,可以采用安森美半导体的NUD3124、NUD3160或NCV7608等继电器驱动器。




评论