海洋维权执法浮标信息采集系统的CAN总线设计

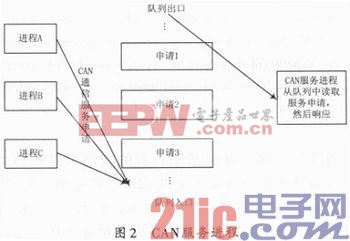
(2)软件的设计。主机和通讯机通过CAN总线相连,作为整个浮标信息采集系统通信的通道。STM32F207内置CAN 2.0接口,支持CAN 2.0B协议,该协议符合国际标准。浮标系统的CAN通信帧采用的是扩展帧格式。考虑系统的通信过程都是突发式的,除了通道标定。不论主机还是通讯机,在将通道标定作为一个独立的模式后,CAN相关功能都设计做服务性的独立进程,CAN通信的服务请求都汇聚到一个消息队列中,都是以消息的形式,最后通过一个统一的进程接收处理。在这种工作机制下,一般情况下,通讯机通过CAN总线发送给主机的第一帧数据,不能被主机可靠地接收。因此,每次通信开始先要建立可靠的通信链路使主机做好准备。建立连接后,通讯机就可以发送命令,要求主机上传数据。通讯机发送完命令后,再发送删除连接帧,这样就完成了一次完整的通信。CAN服务进程如图2所示。本文引用地址://www.cghlg.com/article/192747.htm
3 结论
在此完成了CAN功能进程的设计与实现。系统安装了水文气象传感器及浮标体安全监控传感器等。基于海洋浮标低功耗及安全性的要求,系统由值守节点负责控制启动。
4 结语
本文创新地将CAN总线技术应用于海洋维权执法浮标信息采集系统中。通过CAN总线将主板和通讯板相连,并对软件和硬件进行了设计及测试。实验证明这种对数据的实时采集与传送系统,提高了系统的可靠性,也具有实时性强、纠错能力强等特点,该系统的研制成功具有较高的实际应用意义。











评论