通过图形化开发平台快速构建移动机器人原型

弗吉尼亚理工大学的参赛车Odin是2005年福特翼虎(Escape)混合动力型越野车,如图3所示,并为自主驾驶做了一定程度的改装。NI CompactRIO系统与翼虎操控系统进行交互,通过线控驱动(drive-by-wire)的方式控制油门、方向盘、转向和制动。学生们利用LabVIEW控制,设计与仿真模块开发了路径曲率和速度控制系统,并通过LabVIEW实时模块和FPGA模块部署到CompactRIO硬件平台加以实现,从而建立了一个独立的车辆控制平台。与此同时,学生使用LabVIEW触摸屏模块和NI TPC-2006触摸屏构建用户界面并安装在控制台。本文引用地址://www.cghlg.com/article/188847.htm

图3 弗吉尼亚理工大学的参赛车Odin
2 感知系统
为了满足城市挑战赛的竞赛规则,Odin需要能够定位自身的位置,探测周围的路面状况和可用的行驶车道,识别路径中的所有障碍,并适当分类障碍车辆。Odin安装了多种传感器以满足这些需求,其中包括3枚四平面激光测距仪( LRF )安装在保险杠,另有4枚LRF和2架计算机视觉相机安装在车顶行李架,以及高精度的全球定位系统/惯性测量装置系统(GPS/IMU)。
对于每一类感知需求,都通过多个传感器以实现最大的保真度和可靠性。为了达到灵活的传感器融合,规划软件忽略传感器原始数据,并使用一套由特定任务组件产生的独立于传感器的感知信息。例如,定位组件使用了LabVIEW卡尔曼滤波器来跟踪车辆的位置和方向;道路检测组件使用NI视觉开发模块,结合相机及LRF的数据,确定路面状况和附近路段的每个车道;对象分类组件使用LabVIEW处理LRF数据以检测障碍并对障碍进行分类,然后预测动态障碍和其他车辆的路径及下一步行动。
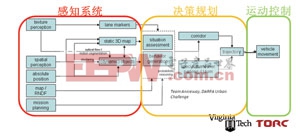
图4 Odin系统组成框架
3 决策规划
路线规划组件使用的是A*搜索算法,以确定Odin应该经过哪些路段从而遍历所有的检查站。驾驶行为组件采用了基于行为的LabVIEW状态机架构,负责遵守交通规则并引导车辆沿计划路线行驶。运动规划组件进行迭代轨迹搜索,避让障碍并引导车辆沿理想轨迹行驶。最后决策判定系统将运动序列传递给车辆控制接口并转换为驱动器控制信号。
4 通信架构
整个通信框架都基于LabVIEW进行开发,实现了汽车工程师协会(SAE) AS-4无人系统联合架构(JAUS)协议,每个软件模块都是JAUS组件,所有模块之间的交互都是通过LabVIEW框架来完成的,每个软件模块可作为独立组件异步运行在Windows或Linux操作系统之下。完成整个通信构架中需要使用多种编程语言,由于LabVIEW的开放性,可以很方便地在其他编程环境中调用LabVIEW软件模块或与之接口。
5 使用LabVIEW的优势
LabVIEW平台提供了一个直观,易于使用的调试环境,可以让开发团队实时地监测源代码的运行,从而方便地实现硬件在环调试。通过LabVIEW开发环境,团队快速可以构建系统原型并加快设计的往复周期。此外, LabVIEW与硬件的无缝连接,对于执行某些关键操作如传感器处理和车辆控制是至关重要的。由于城市挑战赛问题复杂且开发时间很短,这些因素对于开发团队的成功发挥了关键作用。
总结
图形化系统设计对于继续加快机器人设计中的创新而言是必不可少的。复杂的传统工具可能会阻碍机器人技术的进步。LabVIEW提供了一个综合的、可扩展的平台,能够横跨设计、原型开发和部署阶段,因此工程师们能够不用为微小的实现细节所困扰,可以更加关注机器人本身。他们可以使用同样强大的平台,对微控制器直至FPGA等各种控制器进行编程;还可以同几乎任何传感器和执行器发送与接收信号;设计并仿真动态控制系统;以及实现进行远程监视或控制机器人的接口。LabVIEW图形化系统设计平台通过为所有机器人设计者提供一个统一的平台,鼓励设计更为精妙的机器人。








评论