基于微电压调节的太阳能充放电系统设计

3 软件说明
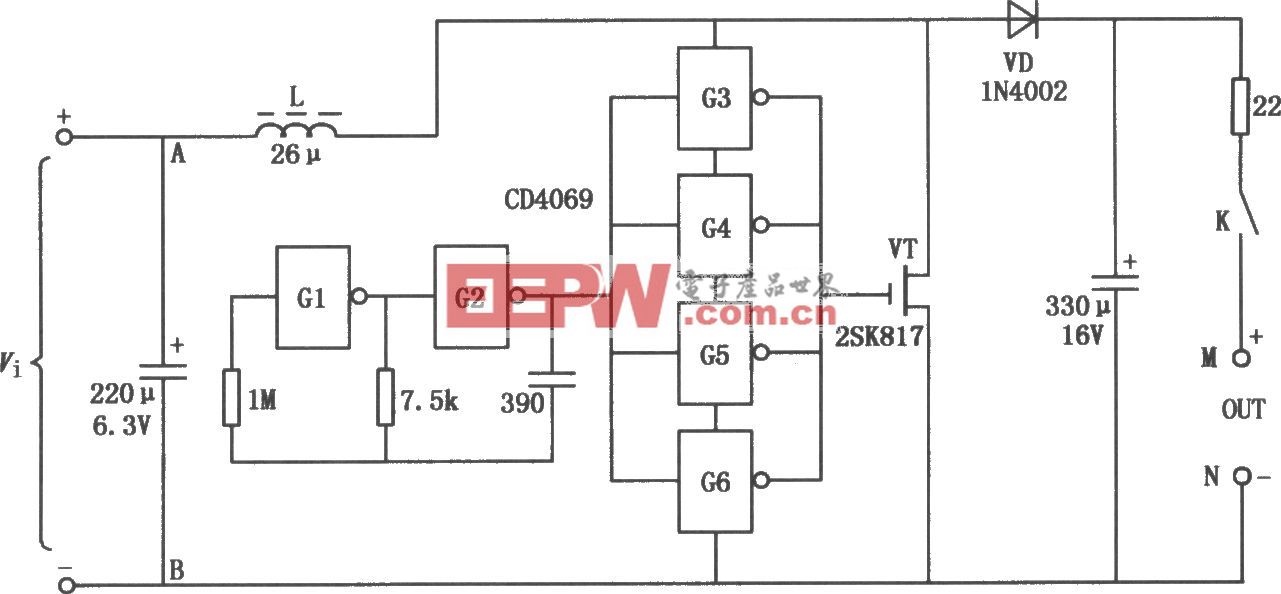
太阳能充放电的程序设计主要由光伏电池板输出的最大功率点追踪程序、A/D数据采集程序、PWM脉冲控制充电程序、充放电控制程序4部分组成。A/D数据采集程序实时动态地采集光伏电池板的输出电压(即图7中C1两端电压)通过检测电容两端电压芯片自动完成对采集数据的分析和处理。电阻分压网络的设计需要注意RC时间常数是否能够满足A/D采样速率的要求。最大功率跟踪程序是软件程序的重点,新算法的提出实现了系统的高效率。充放电控制程序则是系统的核心控制部件,主要由PWM调节控制原理实现高效的输出和匹配。本文引用地址://www.cghlg.com/article/175779.htm
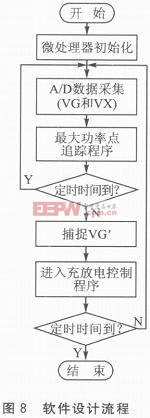
系统软件流程如图8所示。电阻分压网络对光伏电池输出电压(VG)和蓄电池端电压(VX)进行动态采集,将获得的光伏电池输出电压(VG)交给最大功率点追踪程序进行分析和处理;开启定时器,在不超时的情况下,捕捉当前的最佳工作点(VG’);接下来进入充放电控制程序,通过分析VG’和对应的光伏电池输出电压VX’,控制MOS管和三极管的导通和截止,实现充放电的控制;在规定时间内(即工作点重新采集到时),重新采集分析电压,如此循环往复。
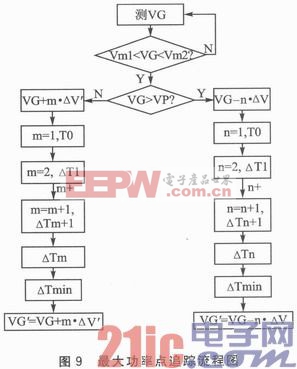
最大功率点追踪流程图如图9所示。Vm1、Vm2分别对应电压增长过程中功率相对接近最大工作点时的两侧电压值,对每一次电压的分析和处理以一定的电压范围为基础,增加追踪的工作效率;由前面的太阳能电池输出特性曲线可知,在最佳工作点(VP)两侧的电压增长幅度有很大的不同,故爬坡过程中采用的步长要予以区分;图中的电压增量步长△V、△V’是随着压差(VG与VP的差值)的改变而改变,以寻求更精确的电压值;在最大工作点VP两侧进行爬坡过程中,不同的m、n对应各自相应时的间差(△Ti),最小定时时间(△Tmin)所对应的电压为该阶段的最佳工作电压,理论基础就是前面所引用的电荷理论。
A/D数据采集程序设计部分主要是解决多通道采集时通道切换方式的问题。本文以轮询方式实现通道的切换,在主函数的调用中以通道号(ChannelNum)作为参数,在多次采集之后求得数据的平均值作为子程序的返回结果。充放电控制程序设计部分主要是解决PwM调试时周期的选择以及占空比的配置问题,由于MOS管的开关频率会带来系统的损耗,所以PWM周期的设置很重要。
根据太阳能电池的输出特性曲线可知,在最大功率点附近摆动时对其最大点的追踪都是爬坡的方式,但是指示方向不同。由于曲线的平缓程度不同,两侧在爬坡的过程中步长也是有区别的,平缓步长大,陡峭步长小,所以步长的选择是重点考虑问题。通过定时/计数器对不同电压爬坡阶段的计时,根据上述电荷量理论,所用时间最短的阶段就是此刻效率最高的阶段,该点就为追踪的最大功率点。
结语
本文研究了太阳能充放电控制系统的简洁高效理论,主要以简单的电路和改进的优化算法实现了系统的高效率转换。该方法在实验阶段是可行的,但是由于自身电路的局限以及外界环境的干扰,该系统的稳定性、电路的精简度有待提高。






评论