用CCD摄像机获取高速运动目标的图像

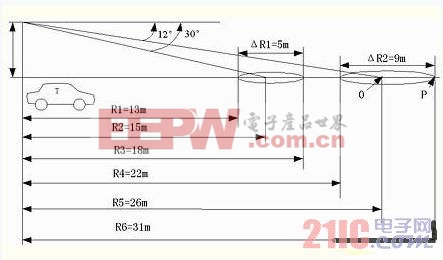
假定车辆以最高时速255km/h(因为测速雷达可测速度上限为255km/h,为了便于分析取此上限。即,若最高速度时,系统能完成既定功能,那么,最高速度以下的情况,系统肯定胜任)驰入测速及抓拍区域,当T车辆驰出测速区域ΔR1的瞬间,测速雷达给出抓拍信号,同时,高速摄象机开始工作。图3中有关参数按以往经验取值,
则: R5=5.5×tg78°≈26m
R2=5.5×tg70°≈15m
在摄像头定焦且光轴下俯12°时,假设清晰画面视角按±2°取值,则:
R4=5.5×tg76°≈22m
R6=5.5×tg80°≈31m
又假如,目标T的速度为VR=255km/h≈71m/s
所以目标T通过抓拍区域ΔR2所用时间为:
9/71≈0.126s
要在这么短的时间内抓拍到高速运动的目标可不是件容易的事。必须对摄像机提出严格的要求。
3.2.1 电子快门速度的影响
摄像机的电子快门速度是首先要考虑的指标。因为,电子快门速度可以看成是对高速目标在空间监测点上出现频率的采样。假如电子快门的速度为1/10000S,那么目标在1/10000S内相对镜头的移动距离为:
71×1/10000=0.0071m=7.1mm
由此可见,当时使用高电子快门速度的摄像机时,运动目标相对于镜头可以认为是静止的。
假如我们以每0.1 m为间隔来观测此运动物体,并且认为摄像机在物体运动0.1m时能够曝光出清晰图像(即认为定焦距时,物体在0.1m范围内是清晰成像范围)那么,此高速目标在0.1m内的出现频率为:
1/0.1/71=710次/S
根据奈奎斯特抽样定理,观测点采样速度应是此频率的两倍即
2×710=1420次/S
而 10000 >> 1420
由此可见,假如目标以255km/h的速度高速形式,采用电子快门速度为1/10000S以上的摄像机是可行的。
3.2.2 为什么不能使用隔行扫描摄像机
以PAL制摄像机为例。PAL制摄像机采用奇场和偶场的复合来得到一帧完整的图像。它的帧频率为25f/s,场频率为50场/S,因此帧周期和场周期分别为40ms、20ms。也就是说,一帧图像的相邻奇行和偶行的复合要间隔20ms。
让我们来看一下目标以255km/h的速度运动时,20ms内它运行了多远:
71×0.02=1.42m
也就是说,奇场扫描后和偶场扫描后复合的图像已经是目标移动1.42m以后的图像了。在此,(笔者定义)定义隔行扫描引起的目标移动距离为隔行扫描模糊距离。
又假如光轴与水平面的交点处O可以得到目标的清晰图像。因为我们采用定焦拍摄,从理论上讲,在拍摄区域只有一点目标是最清晰的,我们可以调焦使O点处最清晰。那么在假定视角±2°的情况下,以抓拍范围内最不清晰处P点与光轴和水平面的交点O的距离作为基准,即最大模糊距离OP(笔者定义),则有:
隔行扫描模糊距离/最大模糊距离 = 1.42/5 = 28.4%
由此可见,因隔行扫描引起的图像模糊度达28.4%。
综合以上分析,采用隔行扫描摄像机不可避免的回引起图像的闪烁和模糊。相反,采用逐行扫描的摄像机则可以解决上述问题,而且还可以使每场图像的扫描分辨率提高!假如摄像机的电子快门速度足够快的话,那么在抓拍区域得到一幅最清晰的图像是完全有可能的。当然,其他因素如车身反光、天气影响暂考虑为理想状态,而且摄像机本身也认为工作在最佳状态下。假如在本系统中采用帧速率为60f/s的逐行扫描摄像机,那么在目标以255km/h的速度运行时,即在0.126秒内能够得到7帧较清晰的图像。其中一帧当电子快门速度足够快时一定是最清晰的。当然,如果我们能找到变焦速度足够快的摄像机,那么可以肯定,在抓拍区域的每帧图像都应是清晰的。
因此,要得到清晰的高速运动目标的图像,选择逐行扫描摄像机的主要出发点是:电子快门速度、分辨率、帧速率。
4 结束语
本文以超速抓拍系统为例对如何用CCD摄像机获取高速运动目标的图像作了较深入的分析。该结果对于其他形式的摄像机或照相机等成像系统也应有一定的借鉴意义。由于笔者水平有限,文中疏漏敬请诸专家不吝赐教。

测速仪相关文章:测速仪原理
激光二极管相关文章:激光二极管原理





评论