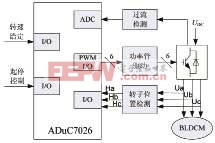
用于Quad-rotor飞行器的无刷直流电机驱动系统整体设计

如图3所示。转子位置检测电路用来检测无刷直流电机转子的位置信号Ha、Hb和Hc,送入微处理器,在微处理器中计算得到电机的转速,与给定转速比较,处理后给出相应的功率开关管控制信号,与PWM高频载波逻辑合成后,控制电子换相线路中开关管的通断,从而实现电机的连续旋转及闭环调速。本文中,转速计算采用测周法,电子换相线路是由6个MOS管组成的三相全桥逆变电路。为避免电机过流损坏,由电阻在电路中采样后,经A/D引脚输入微处理器得到电路的电流值,若此值过大,则由软件控制停止电机。
软件设计
(1)起动程序。由软件实现电机外同步变频加速起动,当电机达到一定转速时(反电势检测信号已清晰可靠),再由软件切换至内同步,即三相六状态运行。
(2)运行程序,包括转子位置获取电路,闭环调速程序。转子位置检测电路输入到微处理器,检测到的反电势过零点信号经ADuC7026处理后输出控制信号,控制功率开关电路通断。转子位置检测电路中的低通滤波环节会使反电势过零点信号发生相移,因此,要对反电势过零点信号进行相位检测并且根据转速给出相应的相位补偿,使电机运行可靠、高效。
部分程序流程图如图4所示。
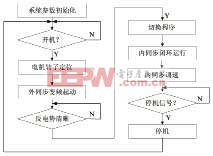
图4 主程序的流程图
实验结果及分析
实验调试中,使用的无刷直流电机端电压最大值是18V,KV值是900rpm/V,功率710W,定子相数为3,转子极对数为7。
微控制器发出控制信号控制功率开关电路,起动部分采用180°导电制,控制波形是占空比为50%的方波。实际测得其中一路控制信号的波形如图5(a)所示,其占空比为50%,与理论相符合。
控制波形经过逻辑合成及缓冲后用于控制功率开关电路的各MOS管,本设计中上桥臂的三个MOS管采用PWM控制,实际得到的功率开关管控制波形如图5(b)所示。
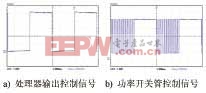
图5 开关管控制信号的获得
在内同步调速时,用示波器同时测量微处理器发出的控制信号的波形和反电势过零点的信号波形,如图6所示。逐步提高PWM的占空比,即端电压,则控制信号频率随着PWM占空比的增加而同步提高,即电机的转速不断上升,实现了闭环PWM调速,波形调速稳定可靠,转速可达9000r/min,可以满足飞行器的高速、高精度要求。
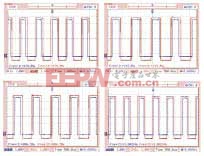
图6 随电压增加控制波形和反馈信号波形变化
结语
本文采用ADuC7026作微处理器,给出了一种用于Quad-rotor飞行器的无刷直流电机驱动系统控制方案。实验结果证明该驱动系统能够很好的起动,并能够准确检测转子的位置信号,实现准确换相,使电机平稳、高速运行,该驱动系统满足飞行器要求的高速性能要求,调速范围宽,且电机运行平稳、可靠,鲁棒性强。











评论