基于TMS320F2812的太阳跟踪器设计

1.2 太阳位置计算的原理
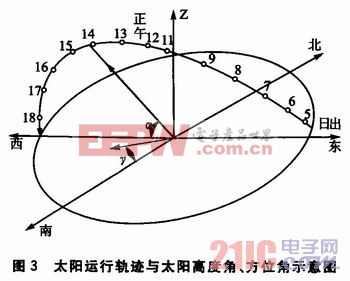
太阳在天球上的位置可由太阳高度角和太阳方位角来确定。地球上观测点同太阳中心连线与地平面的夹角,称为太阳高度角;地球上观测点同太阳中心连线在地平面上的投影与正南方向之间的夹角,称为太阳方位角。太阳运行轨迹与太阳高度角α、方位角γ的关系如图3所示。
要计算α和γ,可以采用以下计算方法:
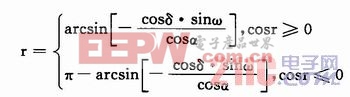
δ为太阳赤位角,ω为太阳时角,φ为当地的纬度。对于δ和ω这两个参数的精确计算要满足高精度跟踪的需求,并根据实际情况来不断修正;同时,还需要结合传感器检测的原理加以修正。采用TMS320F2812做主处理器,根据硬件时钟提供的日历时间计算出太阳的高度角和方
位角,进而控制电机转动方向和角度,由传动机构带动支架转动精确地跟踪太阳。
2 跟踪器体系结构设计
根据上述工作原理,本设计以太阳位置计算的方法为主要跟踪方式,采用硅光电池传感器进行角度偏差反馈,设计了高精度太阳跟踪器。
2.1 主要控制电路硬件设计
硬件结构框图如图4所示。选用TI公司32位定点数字信号处理器TMS320F2812和Altera公司的CPLDEPM3256为主协处理器。由DSP完成计算与控制算法,并产生用于步进电机控制的SPWM波;输入/输出接口采用光电隔离;驱动器电路选择IPM模块,可以达到功率驱动的目的,进而驱动高度和方位步进电机运转。CPLD实现实时显示、扫描键盘、接收扩展中断等功能。二者通过DSP的外部接口(XINTF)进行通信。采用光电开关和限位开关分别实现定位、限位功能,提高了系统的稳定性和可靠性。采用LCD显示和5×5矩阵键盘,方便进行人机交互的临时调整操作。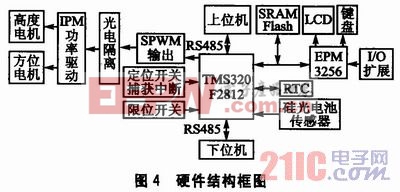
首先利用光电定位开关和硅光电池传感器进行初始对准,通过TMS320F2812的SPI总线设置硬件时钟RTC初值后,利用硬件时钟实时读取时间并计算太阳高度、方位角。在设定的工作时间内,依据计算的太阳高度、方位角选择合适的运行时间和运行速度,计算步进电机应该转的步数和控制板应该发的脉冲数。由 EV事件管理器产生SPWM波,经IPM功率驱动后,驱动高度和方位方向步进电机转动,经机械传动带动太阳能集光器支架转动适当角度,实现自动跟踪。每天工作完以后自动返回归位,若出现较大位置偏差,可以由光电开关和硅光电池传感器进行修正。修正完毕重新进入自动跟踪,工作完成后自动返回。







评论