CAN总线技术在工业码垛机器人控制系统中的应用研究

在图2所示的工业码垛机器人控制系统中,上位主控机选用PC-104工控机,通过PCI总线连接PCI-CAN适配卡,按CANopen协议标准与交流伺服电机控制器进行通信。下位电机伺服驱动器接受上位机发出的指令语言,按指令要求控制电机转动,由电机带动执行机构完成动作。同时,电机伺服驱动器通过交流电机上的光电编码器检测同步感应电机运动状态,结合预先设定在驱动器中的PI调节参数,实现对电机运动状态的实时控制。
采用驱动器与工控机经由CAN总线和PCI-CAN适配卡连接,主要是基于以下考虑。
1 实现一根双绞线串接全部设备,节省安装维护费用。
2 实时性强,信息可共享,提高多控制器系统的监测、诊断和控制性能。
3 通过离线的任务调度、作业下载以及错误监控等方式,可实现工作人员远程操作。在工业码垛机器人现场应用中增加操作人员的安全系数。
4 CAN现场总线发展较为成熟,可供选择的关联驱动器以及控制卡品种众多,方便产品升级与维护。
统软件设计与实现
对于工业码垛机器人运动控制系统来说,上位主控机的控制程序十分重要,其主要部分可分为三大模块,即1)PC与人对话模块;2)CANopen协议通信模块;3)运动控制模块。通过人机对话模块可以给用户提供友好的控制界面,使用户通过触摸屏实施对机器人的控制,包括码放点、抓取点的合理定位,码放方式和货物数量品种的正确选择等。运动控制模块可计算出所选码放方式下电机所需要的运动控制数据,再通过CANopen协议通信模块对机器人的4个关节节点进行数据传输与反馈接收管理。
机器人CANopen协议通信模块主要功能为接收经过运动控制模块计算出的运动控制数据,将其编译为驱动器可以接收的符合CANopen协议的命令控制字并发送;接收驱动器返回的数据和命令并传送给相应的运动控制模块,若没有接收到伺服驱动器的反馈信息,则继续发送信息给驱动器,超时则转入错误处理模块进行错误显示并报警。
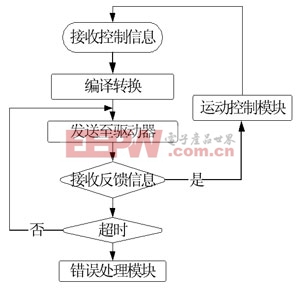
图3 CANopen协议通信程序流程图
实际应用过程中,控制系统CANopen初始化及应用流程如下。
1 电机驱动器初始化设置。设置电机驱动器的控制方式为总线控制方式,电机驱动器的节点ID,系统通信波特率可在电机驱动器的HMI界面中进行设置,也可采用电机驱动器自带的本地调试软件PowerSuit进行本地设置。
2 PCI-CAN适配卡初始化设置。在工控机一侧对PCI-CAN适配卡进行初始化设置,主要设置内容有CAN总线节点个数,波特率,CANopen协议命令的收发方式以及滤波方式等。
工业码垛机器人的运动控制程序主要完成对码垛方式的分解,解算相应驱动电机的运行参数并通过CANopen协议通信模块发送以完成工业码垛机器人的作业动作。具体解算方式因货物形状、码放位置和码放方式有所区别,在此不一一赘述。
错误处理模块的主要功能是接收驱动器返回的错误类型代码,根据电机驱动器厂家定义的对象字典判断所属错误类型并执行对应的错误处理函数或报警。

伺服电机相关文章:伺服电机工作原理










评论