基于航迹推算的移动式机器人定位系统设计


式中,Vx(t)和Vy(t)分别表示x轴和y轴在时间t时的速度,S表示t到t+1时刻的行走路径,φ(t)表示t时刻x轴速度与速度的夹角。
2 系统电路设计
2.1 伺服器电路
伺服器是一种电机驱动器,与普通电机驱动器不同,该驱动器可以与电机连接形成闭环控制单元。伺服器通过实时检测安装在电机上的高分辨率光电编码器的信号计算出电机转速和转角,通过与目标转速和转角进行比较来实时调整电机运动状态。本文引用地址://www.cghlg.com/article/160341.htm
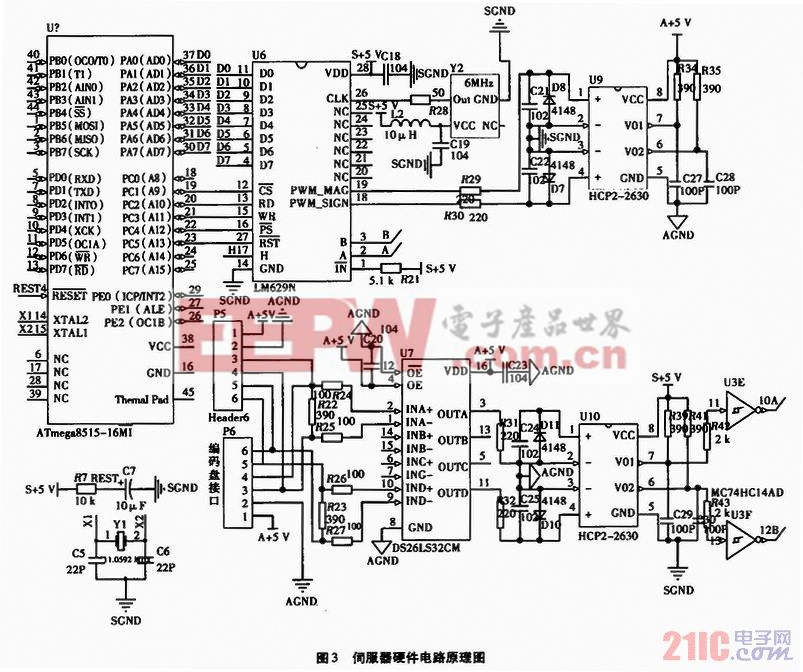
如图3所示为伺服器系统硬件电路的信号处理单元。该电路包括了信号整合和信号运算,其中DS26LS32CM实现编码盘信号的整合,即把4路PWM信号整合成2路PWM信号。由于编码盘信号是由A、B两路相位差为90°的PWM组成,通过对DS26LS32CM逻辑使能口的电平控制,可实现输出端在A、B信号超前或滞后90°时输出高电平或低电平,以此判断出电机正反转状态。LM629为PID信号算法芯片,通过对编码盘信号运算和DS26LS32CM输出信号状态分析,芯片可发出信号使电机一直保持在编码盘的某一个栅格处,让电机急停锁死或准确运动所需要的栅格数,实现对机器人移动的准确控制。HCP-2602为高速光耦芯片,其目的是减少控制端与电机之间的信号干扰。










评论